2 instructions, Independent mode positioning – Omron SYSMAC CP CP1E-N@@D@-@ User Manual
Page 370
2 Instructions
2-334
CP1E CPU Unit Instructions Reference Manual(W483)
Independent Mode Positioning
When independent mode operation is started, pulse output will be continued until the specified number
of pulses has been output.
The deceleration point is calculated from the number of output pulses and deceleration rate set in S and
when that point is reached, the frequency is decreased every pulse control period (4 ms) at the deceler-
ation rate specified in S until the specified number of points has been output, at which point pulse out-
put is stopped.
Note 1 Pulse output will stop immediately if the CPU Unit is changed to PROGRAM mode.
2 The number of output pulses must be set each time output is restarted.
3 The number of output pulses must be set in advance with PULS(881). Pulses will not be output for
ACC(888) if PULS(881) is not executed first.
4 The direction set in the ACC(888) operand will be ignored if the number of pulses is set with PULS(881) as
an absolute value.
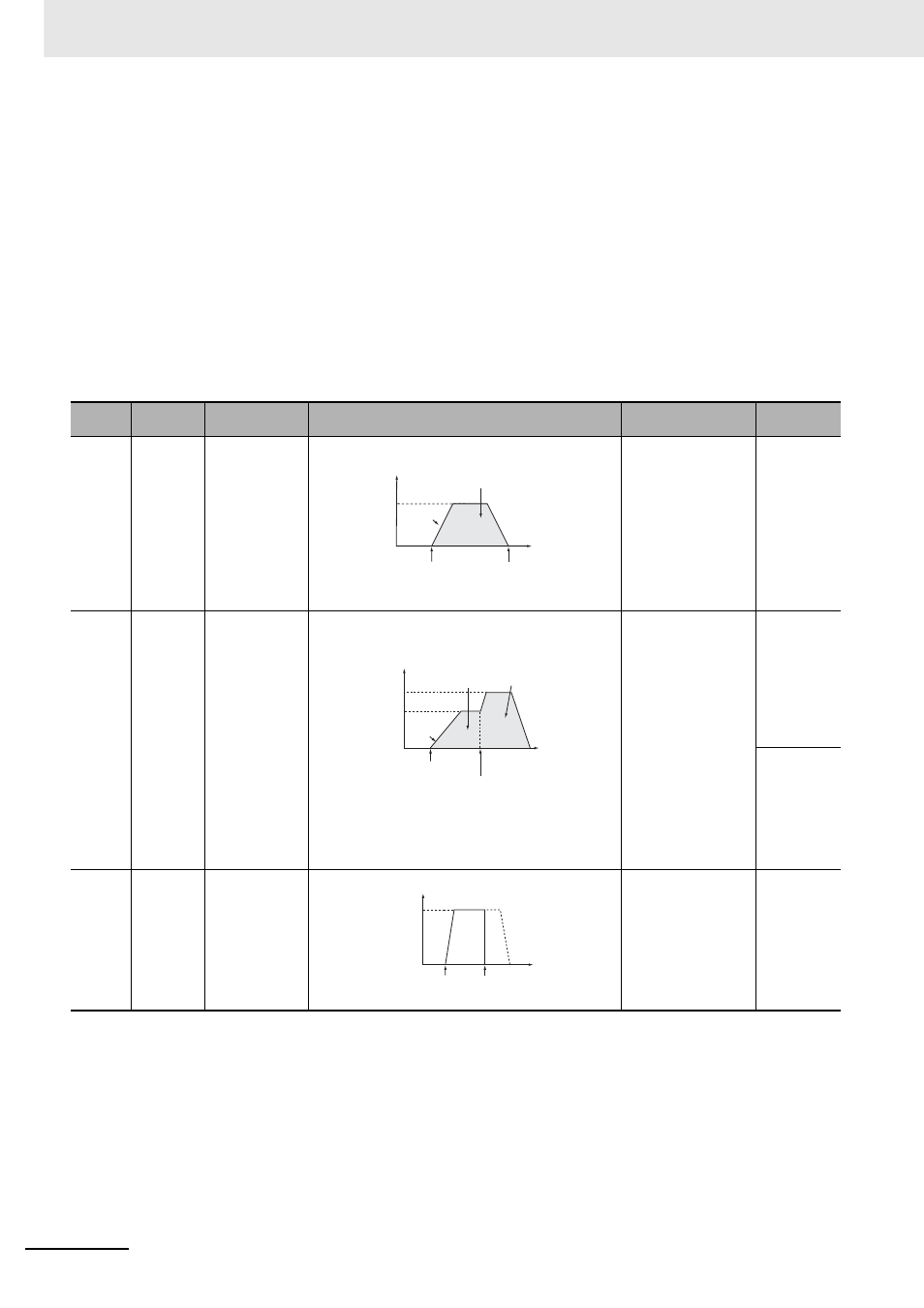
Opera-
tion
Purpose
Application
Frequency changes
Description
Procedure/
instruction
Starting
pulse out-
put
Simple trap-
ezoidal con-
trol
Positioning with
trapezoidal accel-
eration and decel-
eration (Same rate
used for accelera-
tion and decelera-
tion; no starting
speed)
The number of
pulses cannot be
changed during
positioning.
Accelerates and deceler-
ates at the same fixed
rate and stops immedi-
ately when the specified
number of pulses has
been output. (See note.)
Note The target position
(specified number
of pulses) cannot
be changed during
positioning.
PULS(886)
↓
ACC(888)
(Independent)
Chang-
ing set-
tings
To change
speed
smoothly
(with the
same accel-
eration and
decelera-
tion rates)
Changing the tar-
get speed (fre-
quency) during
positioning
(acceleration rate
= deceleration
rate)
ACC(888) can be exe-
cuted during positioning
to change the accelera-
tion/deceleration rate
and target frequency.
The target position
(specified number of
pulses) is not changed.
PULS(886)
↓
ACC(888) or
SPED(885)
(Independent)
↓
ACC(888)
(Independent)
PLS2(887)
↓
ACC(888)
(Independent)
Stopping
pulse out-
put
To stop
pulse out-
put. (Num-
ber of
pulses set-
ting is not
preserved.)
Immediate stop
Pulse output is stopped
immediately and the
remaining number of out-
put pulses is cleared.
PULS(886)
↓
ACC(888)
(Independent)
↓
INI(880)
Pulse frequency
Target
frequency
Specified number of
pulses (Specified
with PULS(886).)
Execution of
ACC(888)
Outputs the specified
number of pulses and
then stops.
Time
Acceleration/
deceleration
rate
Changed target
frequency
Target frequency
Specified
number of
pulses
(Specified with
PULS(886).)
Number of pulses
specified with
PULS(886) does
not change.
Pulse
frequency
Acceleration/
deceleration
rate
Execution of
ACC(888)
(independent
mode)
ACC(888) (independent
mode) executed again to
change the target frequency.
(The target position is not
changed, but the
acceleration/deceleration rate
is changed.)
Time
Pulse frequency
Present
frequency
Execution of
ACC(888)
Time
Execution of
INI(880)