Direction of action, Adjusting pid parameters, 2 instructions – Omron SYSMAC CP CP1E-N@@D@-@ User Manual
Page 302
2 Instructions
2-266
CP1E CPU Unit Instructions Reference Manual(W483)
Direction of Action
When using PID control, select either of the following two control directions. In either direction, the MV
increases as the difference between the SV and the PV increases.
• Forward action: MV is increased when the PV is larger than the SV.
• Reverse action: MV is increased when the PV is smaller than the SV.
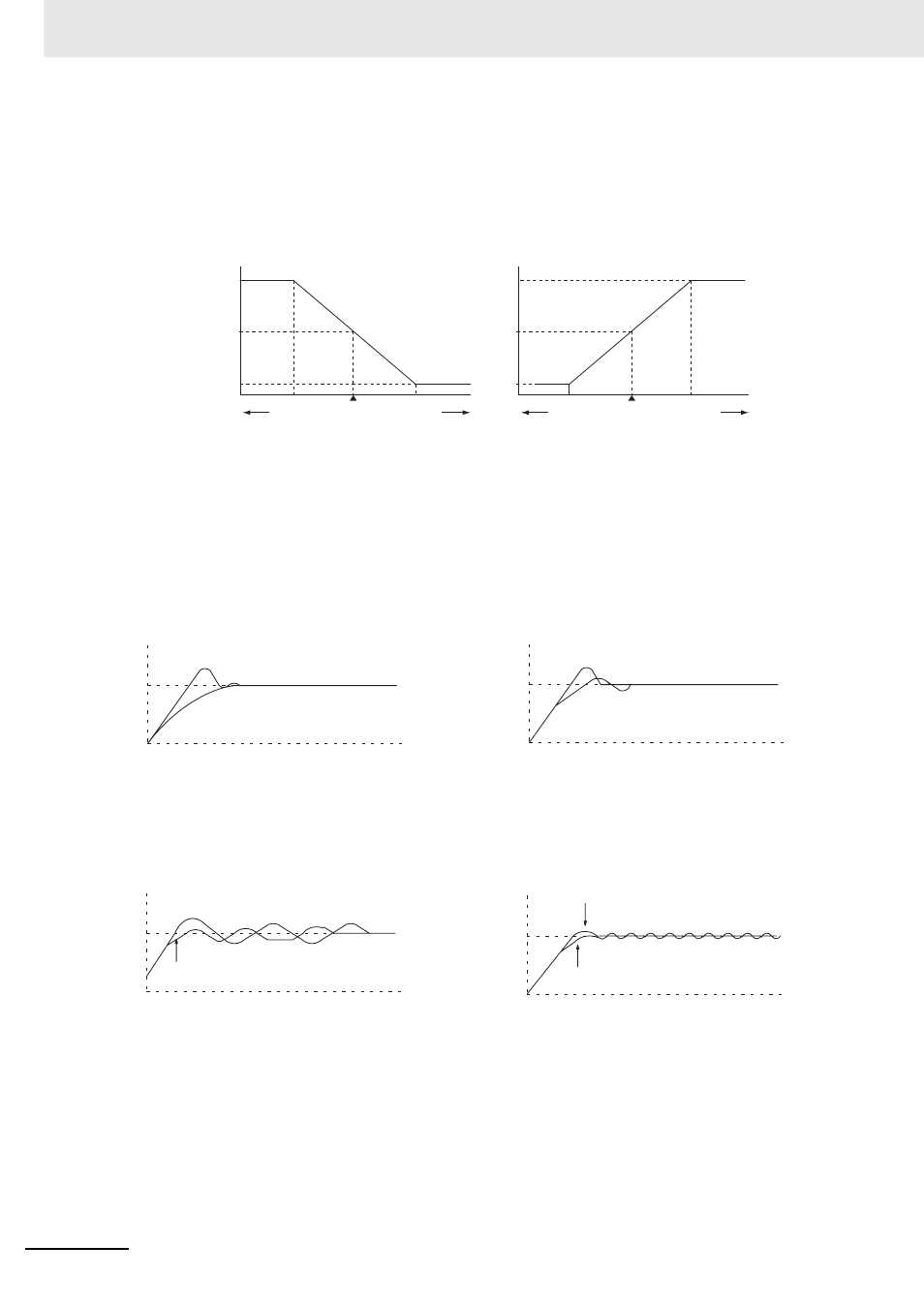
Adjusting PID Parameters
The general relationship between PID parameters and control status is shown below.
• When it is not a problem if a certain amount
of time is required for stabilization (settle-
ment time), but it is important not to cause
overshooting, then enlarge the proportional
band.
• When overshooting is not a problem but it is
desirable to quickly stabilize control, then
narrow the proportional band. If the propor-
tional band is narrowed too much, however,
then hunting may occur.
• When there is broad hunting, or when oper-
ation is tied up by overshooting and under-
shooting, it is probably because integral
action is too strong. The hunting will be
reduced if the integral time is increased or
the proportional band is enlarged.
• If the period is short and hunting occurs, it
may be that the control system response is
quick and the derivative action is too strong.
In that case, set the derivative action lower.
100%
50%
0%
100%
50%
0%
Output
Output
Forward Action
Reverse Action
Low
temperature
SV
SV
High
temperature
Low
temperature
High
temperature
(MV output designation: 50%)
SV
Control by measured PID
When P is enlarged
SV
When P is narrowed
Control by measured PID
SV
Control by measured PID
(when loose hunting occurs)
Enlarge I or P.
SV
Control by measured PID
(when hunting occurs in a short period)
Lower D.