Yaskawa G5HHP Drive User Manual
Page 211
7.5 Common Functions
7 - 47
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
g
during
Opera-
tion
Setting
Range
Unit Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
b5-06
PID limit
f
0.0 to 100.0
%
100.0
A
A
A
A
•
Constant b5-06 prevents the frequency reference after PID control from exceeding the fixed
amount.
•
Set this constant as a percentage of the maximum output frequency, with the maximum frequency
taken as 100%.
D
PID Offset Adjustment: b5-07
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
g
during
Opera-
tion
Setting
Range
Unit Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
b5-07
PID offset adjustment
f
--100.0 to
100.0
%
0.0
A
A
A
A
•
Constant b5-07 adjusts the PID control offset.
•
If both the target value and the feedback value are set to zero, adjust the Inverter’s output frequency
to zero.
D
PID Primary Delay Time Constant: b5-08
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
g
during
Opera-
tion
Setting
Range
Unit Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
b5-08
PID primary delay
time constant
f
0.00 to
10.00
s
0.00
A
A
A
A
•
Constant b5-08 is the low-pass filter setting for PID control outputs.
•
There is normally no need to change the setting.
•
If the viscous friction of the mechanical system is high, or if the rigidity is low, causing the mechani-
cal system to oscillate, increase the setting so that it is higher than the oscillation frequency period.
This will decrease the responsiveness, but it will prevent the oscillation.
Adjusting PID Control
Use the following procedure to activate PID control and then adjust it while monitoring the response.
1. Enable PID control (set b5-01 to 2 or 1).
2. Increase the proportional gain P in b5-02 as far as possible without creating oscillation.
3. Reduce the integral time I in b5-03 as far as possible without creating oscillation.
4. Increase the differential time (D) in b5-05 as far as possible without creating oscillation.
Making Fine Adjustments
First set the individual PID control constants, and then make fine adjustments.
D
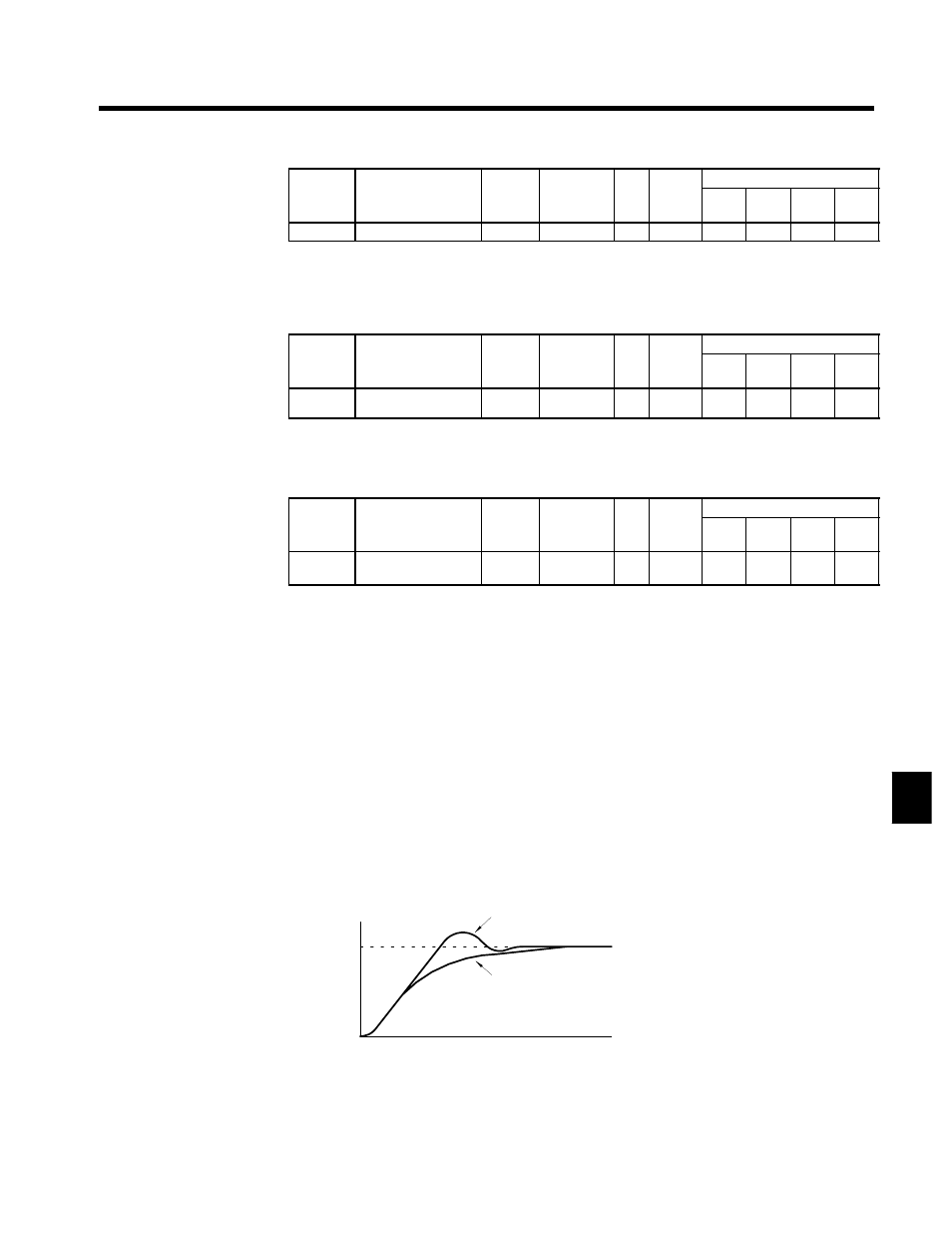
Reducing Overshooting
If overshooting occurs, shorten the derivative time (D) and lengthen the integral time (I).
After adjustment
Before adjustment
Response
Time
D
Rapidly Stabilizing Control Status
To rapidly stabilize the control conditions even when overshooting occurs, shorten the integral time (I)
and lengthen the derivative time (D).
7