Yaskawa G5HHP Drive User Manual
Page 187
7.3 Flux Vector Control
7 - 23
Speed Limit Bias Setting: d5-05
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
g
during
Opera-
tion
Setting
Range
Unit Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
d5-05
Speed limit bias
x
0 to 120
%
10
x
x
x
A
D
The speed limit bias can be used to add margins to the speed limit.
D
When the speed limit bias is used, it is possible to set the same speed limit value in both the forward and
reverse directions.
D
Set the speed limit bias as a percentage of the maximum output frequency. (The max. frequency is
100%.)
For example, the following settings establish speed limits of 50% of the maximum output frequency in
both the forward and reverse directions.
•
Speed limit setting: Zero (with d5-04 as the speed limit: d5-03 = 2, d5-04 = 0)
•
Speed limit bias setting: 50% (d5-05 = 50)
D
When a forward speed limit and a speed limit bias have been set, the speed range of the torque control
is from the “--speed limit bias setting” to the “speed limit setting + speed limit bias setting.
In effect, the speed limit range is extended by the speed limit bias in both the forward and reverse direc-
tions.
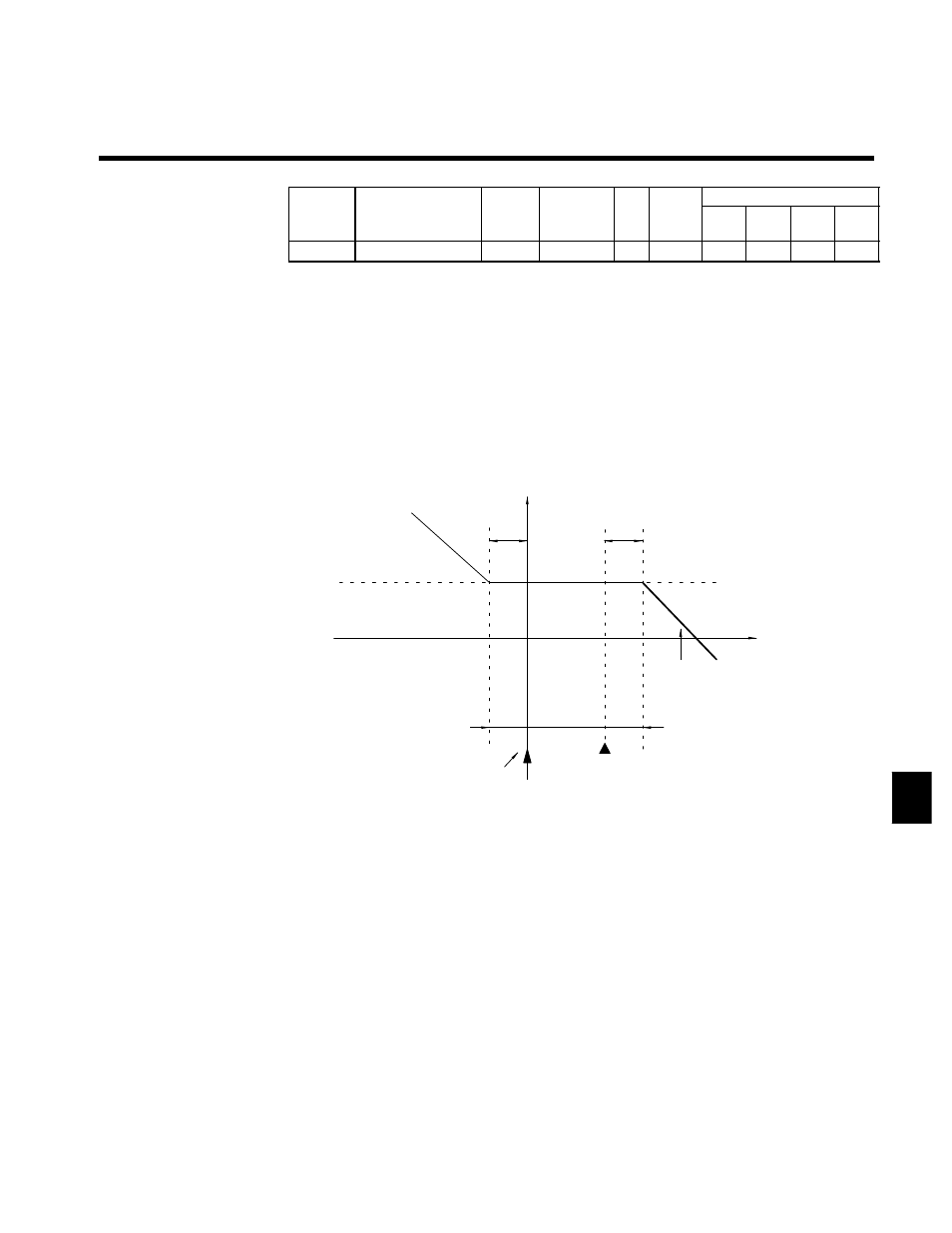
When the speed exceeds the reverse
speed limit, the torque is increased in
the forward direction.
Output torque
Forward
direction
d5-05
Torque reference value
Reverse
rotation
Motor speed
Forward
rotation
When the speed exceeds the forward
speed limit, the torque is increased in
the reverse direction.
Effective range of torque control
Limit opposite to speed limit setting
Reverse
direction
Speed limit setting
d5-05
Fig 7.11
Speed Limit Bias Settings
Operation
The following operation will be performed if the torque reference is greater than 0 and the speed limit is
greater than 0 (winder operation).
D
If (--1
x
speed limit bias (d5-05)) ≺ motor speed ≺ (speed limit + d5-05), the torque will be controlled
according to the set torque reference.
D
If the motor speed ≻ (speed limit + d5-05), the speed limit circuit will output a negative torque reference
to prevent the motor speed from increasing.
D
If the motor speed ≺(--1 x d5-05), the speed limit circuit will output a positive torque reference to pre-
vent the speed from increasing in the reverse direction.
Thus, if the torque reference is greater than 0 and the speed limit is greater than 0, the torque will be con-
trolled within the following limits:
(--1 x d5-05) ≺ motor speed ≺ (speed limit + d5-05)
7