3 setting motor constants, Hunting prevention selection: c7-01, Hunting prevention gain: c7-02 – Yaskawa G5HHP Drive User Manual
Page 200: Motor rated slip: e2-02, Motor no-load current: e2-03
Advanced Operation
7.4.3 Setting Motor Constants
7 - 36
J
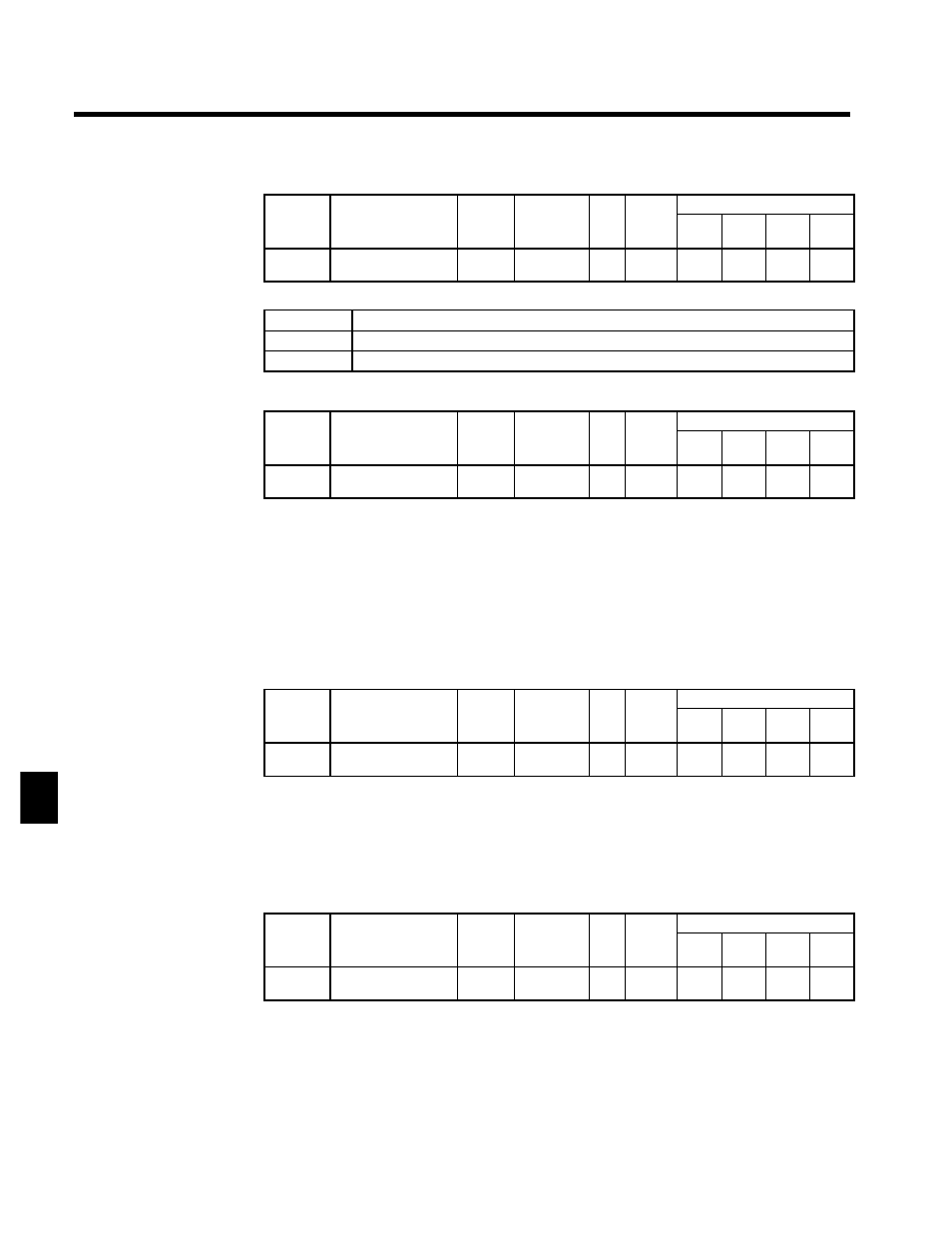
Hunting Prevention Selection: C7-01
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
g
during
Opera-
tion
Setting
Range
Unit Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
C7-01
Hunting prevention
selection
x
0, 1
--
1
A
A
x
x
D
Settings
Setting
Function
0
Disables the hunting-prevention function.
1
Enables the hunting-prevention function.
J
Hunting Prevention Gain: C7-02
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
g
during
Opera-
tion
Setting
Range
Unit Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
C7-02
Hunting prevention
gain
x
0.00 to 2.50 Mul-
tiple
1.00
A
A
x
x
D
Normally it isn’t necessary to change these constants. Adjust these constants as follows if hunting occurs
with a light load.
•
Increase the setting in C7-02 if oscillation occurs when operating with a light load.
(If the setting is increased too much, the current can fall to the point where stalling occurs.)
•
Decrease the setting in C7-02 if stalling occurs.
•
Disable the hunting-prevention function (C7-01 = 0) if high responsiveness is more important than
suppressing oscillation.
7.4.3 Setting Motor Constants
J
Motor Rated Slip: E2-02
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
g
during
Opera-
tion
Setting
Range
Unit Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
E2-02
Motor rated slip
x
0.00 to
20.00
Hz
1.30
A
A
Q
Q
D
These settings are used as reference values for the motor slip compensation function.
D
The default setting depends upon the Inverter capacity.
(The table shows the default settings for 400-V class, 200 kW Inverters.) (See page 8 - 42.)
D
Calculate the rated slip (E2-02) from the value shown on the motor nameplate with the following equa-
tion and set this value.
Rated slip = rated frequency (Hz) -- rated speed (r/min) × number of poles/120
J
Motor No-load Current: E2-03
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
g
during
Opera-
tion
Setting
Range
Unit Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
E2-03
Motor no-load current
x
0.00 to
2000.0
A
96.0
A
A
Q
Q
D
These settings are used as reference values for the motor slip compensation function.
D
The default setting depends upon the Inverter capacity.
(The table shows the default settings for 400-V class, 200 kW Inverters.) (See page 8 - 42.)
D
Set the no-load current (E2-03) at the rated voltage and rated frequency. Normally this value isn’t shown
on the motor nameplate, so it might be necessary to contact the motor manufacturer.
7