5 speed control (asr) gain, Gain adjustment procedure, Fine adjustments – Yaskawa G5HHP Drive User Manual
Page 154
Basic Operation
6.4.5 Speed Control (ASR) Gain
6 - 36
6.4.5 Speed Control (ASR) Gain
J
Gain Adjustment Procedure
Use the following procedure to adjust the gain with the mechanical system and actual load connected.
NO
YES
At zero-speed, increase C5-01 (ASR
P Gain 1) until there is no oscillation.
At zero-speed, decrease C5-02 (ASR
I Time 1) until there is no oscillation.
Does oscillation develop when the
motor operates at the maximum nor-
mal operating speed?
Adjustment completed.
(When there is higher-level position
control, adjust the position loop gain
so that overshooting/undershooting
doesn’t occur.)
Decrease C5-01 (ASR P Gain 1).
Increase C5-02 (ASR I Time 1).
Fig 6.17
Gain Adjustment Procedure
J
Fine Adjustments
D
When you want even finer gain adjustment, adjust the gain while observing the speed waveform.
D
Constant settings like those shown in the following table will be necessary to monitor the speed wave-
form.
Constant
Setting
Explanation
H4-01 Analog output selection (terminal 45)
2
Settings that allow multi-function
H4-02 Analog output gain (terminal 45)
1.00
Settings that allow multi-function
analog output 1 to be used to moni-
t th
t t f
H4-03 Analog output bias (terminal 45)
0.0
g
p
tor the output frequency.
H4-04 Analog output selection (terminal 48)
5
Settings that allow multi-function
H4-05 Analog output gain (terminal 48)
1.00
Settings that allow multi-function
analog output 2 to be used to moni-
t th
t
d
H4-06 Analog output bias (terminal 48)
0.0
g
p
tor the motor speed.
H4-07 Analog output level selection
1
This setting allows a 0 to ±10 V sig-
nal range to be monitored.
D
The multi-function analog outputs have the following functions with these constant settings.
•
Multi-function analog output 1 (terminal 45): Outputs Inverter’s output frequency (0 to ±10 V).
•
Multi-function analog output 2 (terminal 48): Outputs actual motor speed (0 to ±10 V).
Terminal 46 is the multi-function analog output common.
D
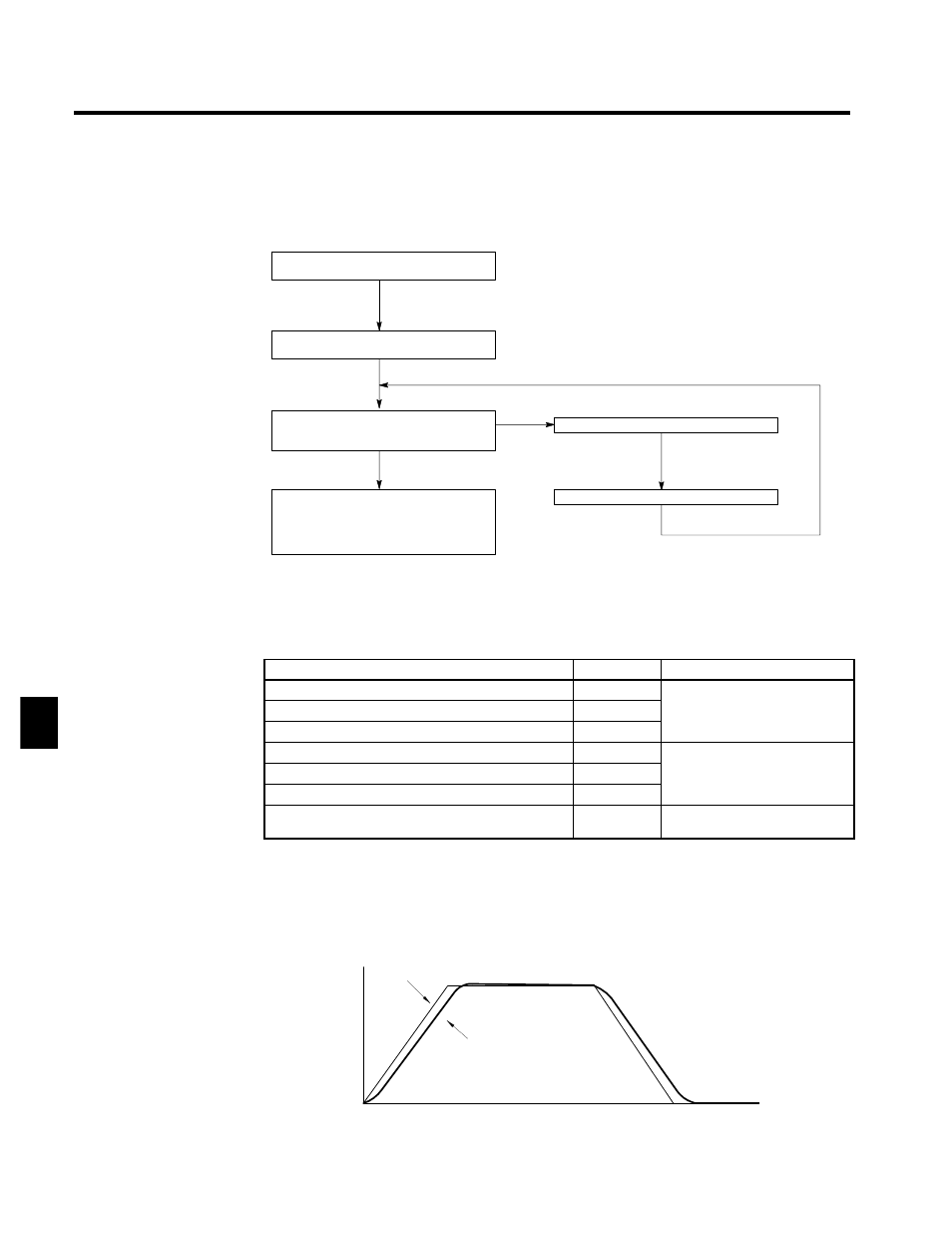
We recommend monitoring both the output frequency and the motor speed to monitor the response delay
or deviations from the reference value, as shown in the following diagram.
Motor
speed
Output frequency
Motor speed (response)
Time
Fig 6.18
Example Monitor Waveforms
6