1 droop control function, Droop control gain: b7-01, Droop control delay time: b7-02 – Yaskawa G5HHP Drive User Manual
Page 181
7.3 Flux Vector Control
7 - 17
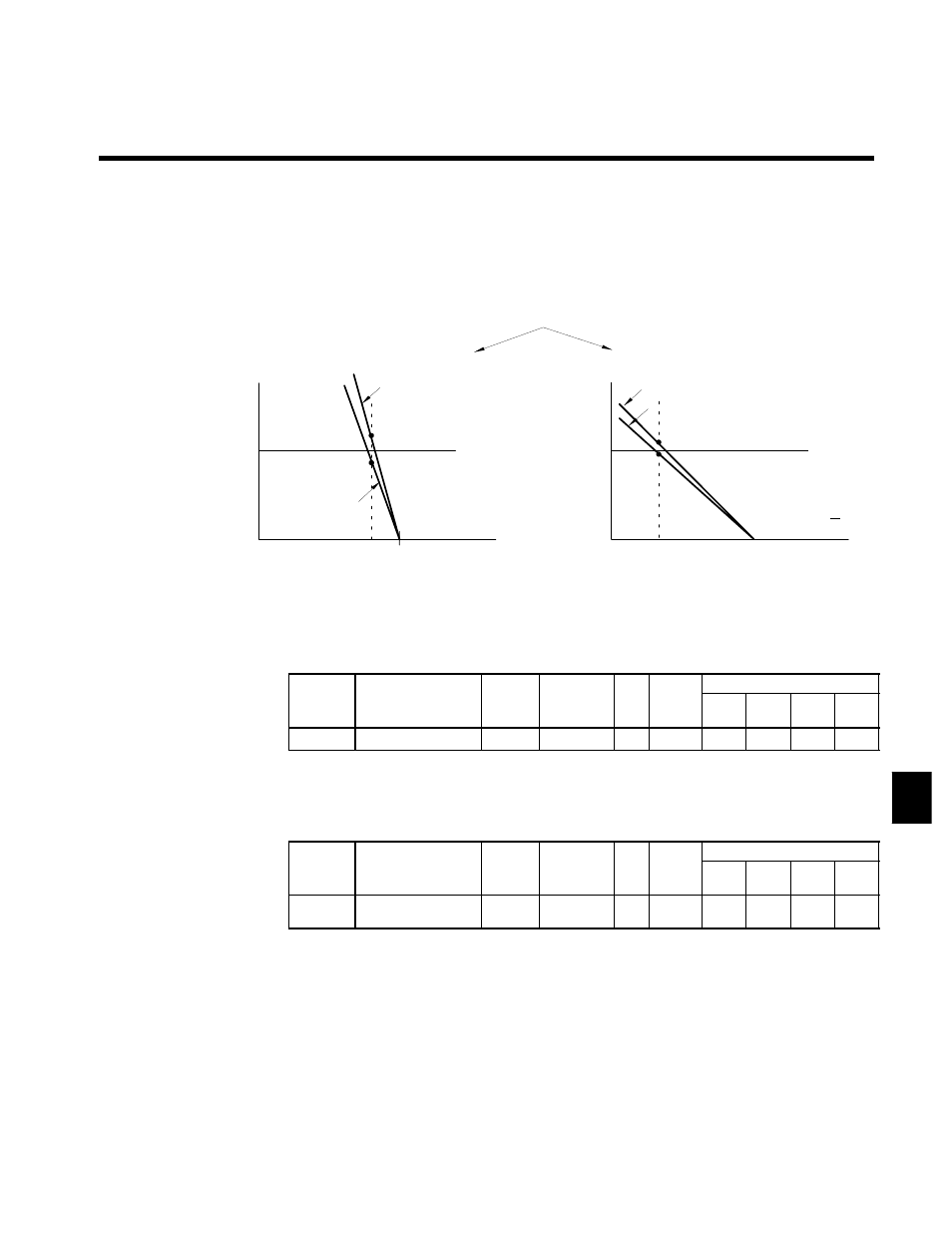
7.3.1 Droop Control Function
Droop control is a function that allows the user to set the amount of motor slip. When a single load is operated
with two motors (such as in a crane conveyor), a high-resistance motor is normally used, as shown in Figure
7.5.
If droop control is used, a high-resistance motor characteristics can be set for a general-purpose motor. Also,
it is easy to make adjustments while watching the load balance because the amount of slip can be set arbi-
trarily.
The balance of the load is very different with different amounts of slip.
Torque
Motor A’s torque
characteristics
Load torque
Motor B’s torque
characteristics
T
A
-T
B
>>0
Reference
speed
Speed
Load balance when using a general-purpose motor
T
A
T
B
Load balance when using a high-resistance motor
Torque
Motor A’s torque characteristics
Load torque
T
A
-T
B~
0
Reference
speed
Speed
T
A
T
B
Motor B’s torque characteristics
Fig 7.5
Droop Control Function
J
Droop Control Gain: b7-01
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
g
during
Opera-
tion
Setting
Range
Unit Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
b7-01
Droop control gain
x
0.0 to 100.0
%
0.0
x
x
x
A
D
Set the amount of slip as the percentage of slip when the maximum output frequency is input and the
rated torque is generated.
D
Droop control is disabled if b7-01 is set to 0.0.
J
Droop Control Delay Time: b7-02
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
g
during
Opera-
tion
Setting
Range
Unit Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
b7-02
Droop control delay
time
x
0.03 to 2.00
s
0.05
x
x
x
A
D
Constant b7-02 is used to adjust the responsiveness of droop control.
D
Increase this setting if oscillation or hunting occur.
7