Stop mode, Stop time lim, Stopping cur – Rockwell Automation 1326 Digital AC Multi-Axis Motion Control System User Manual User Manual
Page 158: Sum on days, Sum on minutes, Sys i/o image
Publication 1394-5.0 — May 2000
8-22
Configuring Your 1394 Analog Servo System
[Stop Mode]
Parameter to select whether the axis module
should velocity command to zero (regen) or
coast to a stop
Parameter Numbers
240, 241, 242, 243
Parameter Group
Vel Cmd Data
Display Units
None
Parameter Type
Read/Write
Change While Running
Yes
Linkable
No
Default Value
0
"Regen"
Selections
0
"Regen"
1
"Coast"
[Stop Time Lim]
Maximum amount of time that the module will
remain enabled while trying to stop. Useful for
very slow velocity rate change settings.
Important: If hardware enables are used to stop
the drive, circuitry only allows 0.5 seconds before
disabling (independent of this parameter).
Parameter Numbers
384, 385, 386, 387
Parameter Group
Vel Cmd Data
Display Units
secs
Parameter Type
Read/Write
Change While Running
Yes
Linkable
No
Minimum Value
2 secs
Maximum Value
120secs
Default Value
2 secs
[Stopping Cur]
During a regen stop, the amount of current
available to stop the motor. (Only works when
StopMode = Regen)
Parameter Numbers
308, 309, 310, 311
Parameter Group
Vel Cmd Data
Display Units
amps
Parameter Type
Read/Write
Change While Running
Yes
Linkable
No
Minimum Value
0% of rated motor current
Maximum Value
300% of rated motor current
Default Value
300% of rated motor current
[Sum On Days]
Displays the total number of days that the drive
has ever had control power applied
Parameter Numbers
95
Parameter Group
Linear List
Display Units
None
Parameter Type
Read Only
Linkable
No
[Sum On Minutes]
Display the total number of minutes that the drive
has ever had control power applied.
Parameter Numbers
94
Parameter Group
Linear List
Display Units
None
Parameter Type
Read Only
Linkable
No
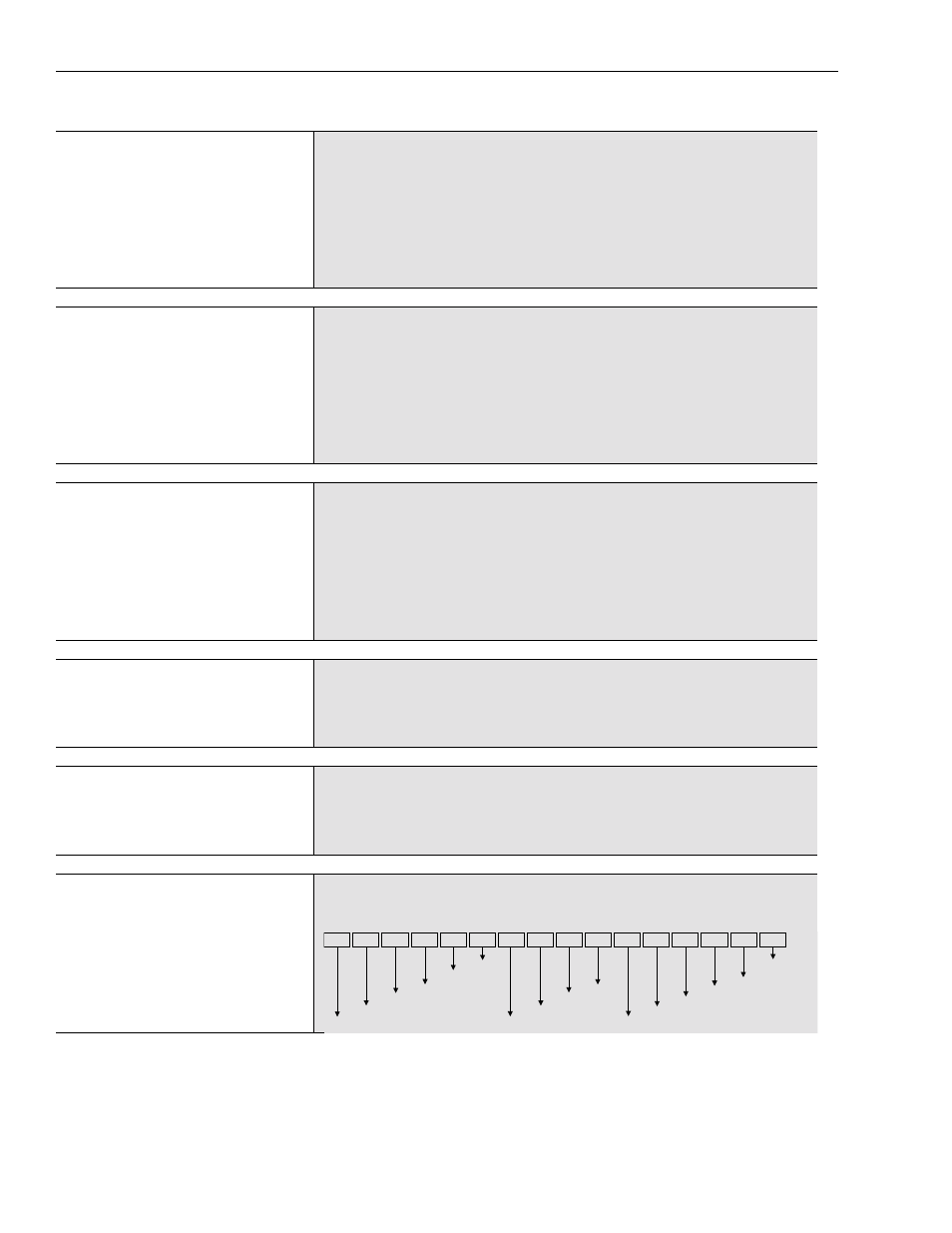
[Sys I/O Image]
Displays the processor image of these hardware
signals.
Parameter Numbers
7
Parameter Group
Linear List
Parameter Type
Read Only
Bit 15
Bit 14
Bit 13
Bit 12
Bit 11
Bit 10
Bit 9
Bit 8
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
AQB disable
HDW reset request
Axis 3 HWD enable request
Axis 2 HWD enable request
Axis 1 HWD enable request
Axis 3 feedback loss
Axis 2 feedback loss
Axis 1 feedback loss
Axis 0 feedback loss
Axis 3 enabled
Axis 2 enabled
Axis 1 enabled
Axis 0 enabled
Drive OK relay
Cont EN relay
Axis 0 HWD
enable request