6 configuration – JUMO 705010 mTRON T - Multichannel Controller Module Operating Manual User Manual
Page 77
77
6 Configuration
For first order control paths, the parameters required for the PI controller structure are opti-
mized, independently of the configured parameters.
Error processing
If the actual value leaves the measuring range (out of range) during self-optimization, the self-
optimization process is aborted. In this case, the configured parameters are not changed.
Start of self-optimization
Self-optimization can be started using any signal from the digital selector. Any other signal from
the digital selector can be used to abort (stop) self-optimization.
It can also be started and stopped using the multifunction panel. Self-optimization must also be
generally permitted in this case.
Chapter 5.3.1 "Multichannel controller module", page 43
If self-optimization is started with a signal from the digital selector, it can also be stopped on the
multifunction panel.
Optimization according to the oscillation method
In the case of a large control deviation between the setpoint value and actual value (e.g. in the
startup phase), the controller determines a switching line around which the control variable per-
forms a forced oscillation during self-optimization. The switching line is determined so that the
actual value does not exceed the setpoint value if possible.
In the case of minor control deviation (e.g. if the control loop is in a steady state during opera-
tion), oscillation is forced around the setpoint value. Here, the setpoint value is exceeded in any
case.
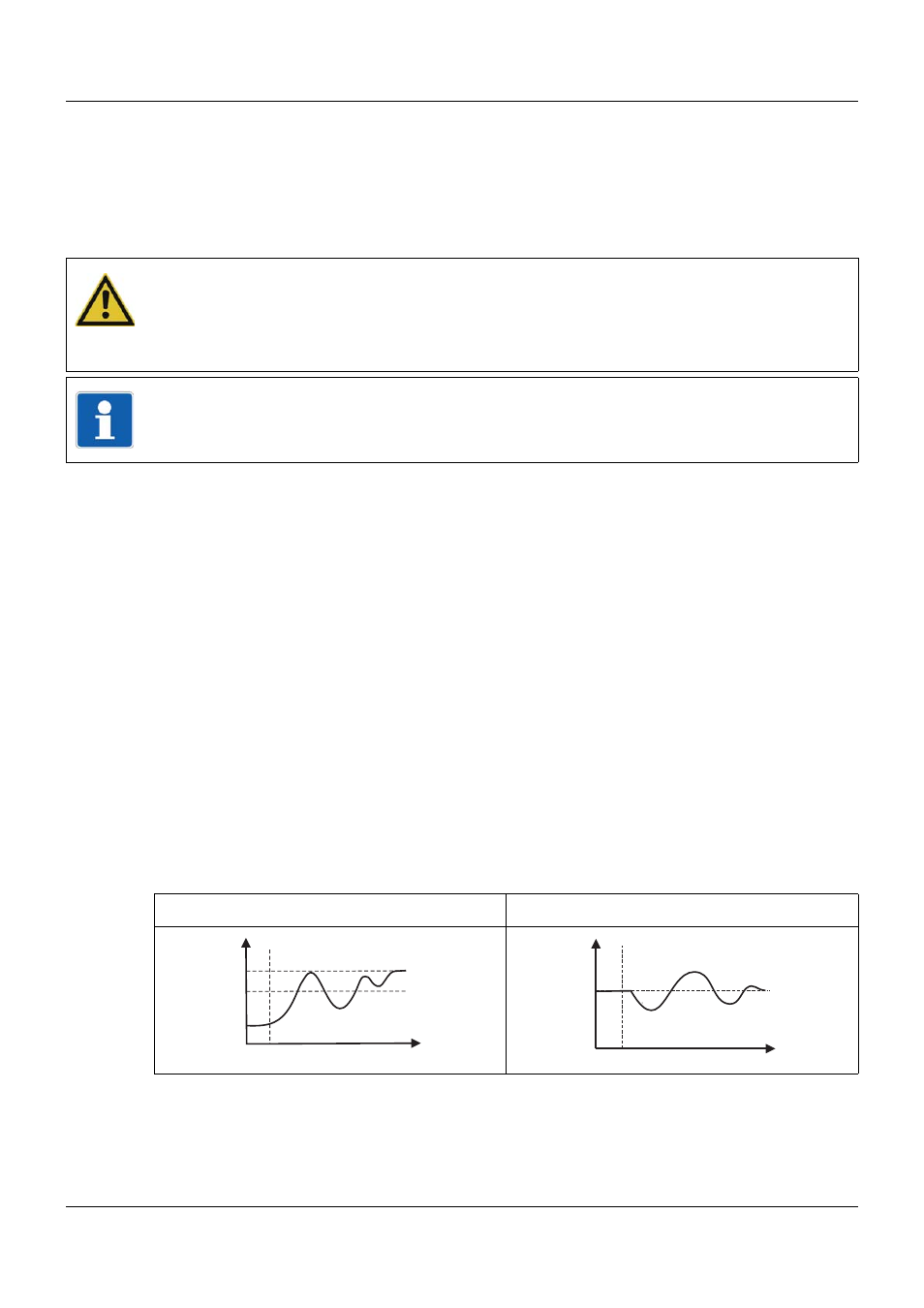
The controller automatically chooses between two procedures depending on the extent of the
control deviation:
WARNING!
During self-optimization according to the oscillation method, output level limits Y1 and Y2 are
not active for switched outputs or solid state outputs.
The output level may exceed or fall below the set limits.
It must be ensured that this does not result in damage to the plant.
TIP!
Optimization must be performed under real operating conditions; it can be performed any
number of times.
Self-optimization during the startup phase
Self-optimization during operation
t
x
w
t1
S
w
x
t1
t
x Actual value
w Setpoint value
S Switching line
t1 Start of self-optimization