6 configuration – JUMO 705010 mTRON T - Multichannel Controller Module Operating Manual User Manual
Page 76
6 Configuration
76
Method
The standard method is the oscillation method, whereas the step response method is used
specifically in the plastics industry.
With the oscillation method, the output level is set alternately to 100 % and 0 %, which produc-
es oscillation of the control variable. With the step response method, a step of a specified size
is made from the standby output. In both cases, the controller determines the optimum control-
ler parameters from the response of the actual value.
"Optimization according to the oscillation method", page 77
"Optimization according to the step response method", page 78
SO output 1, 2
The cycle time is calculated on the basis of the type of controller output.
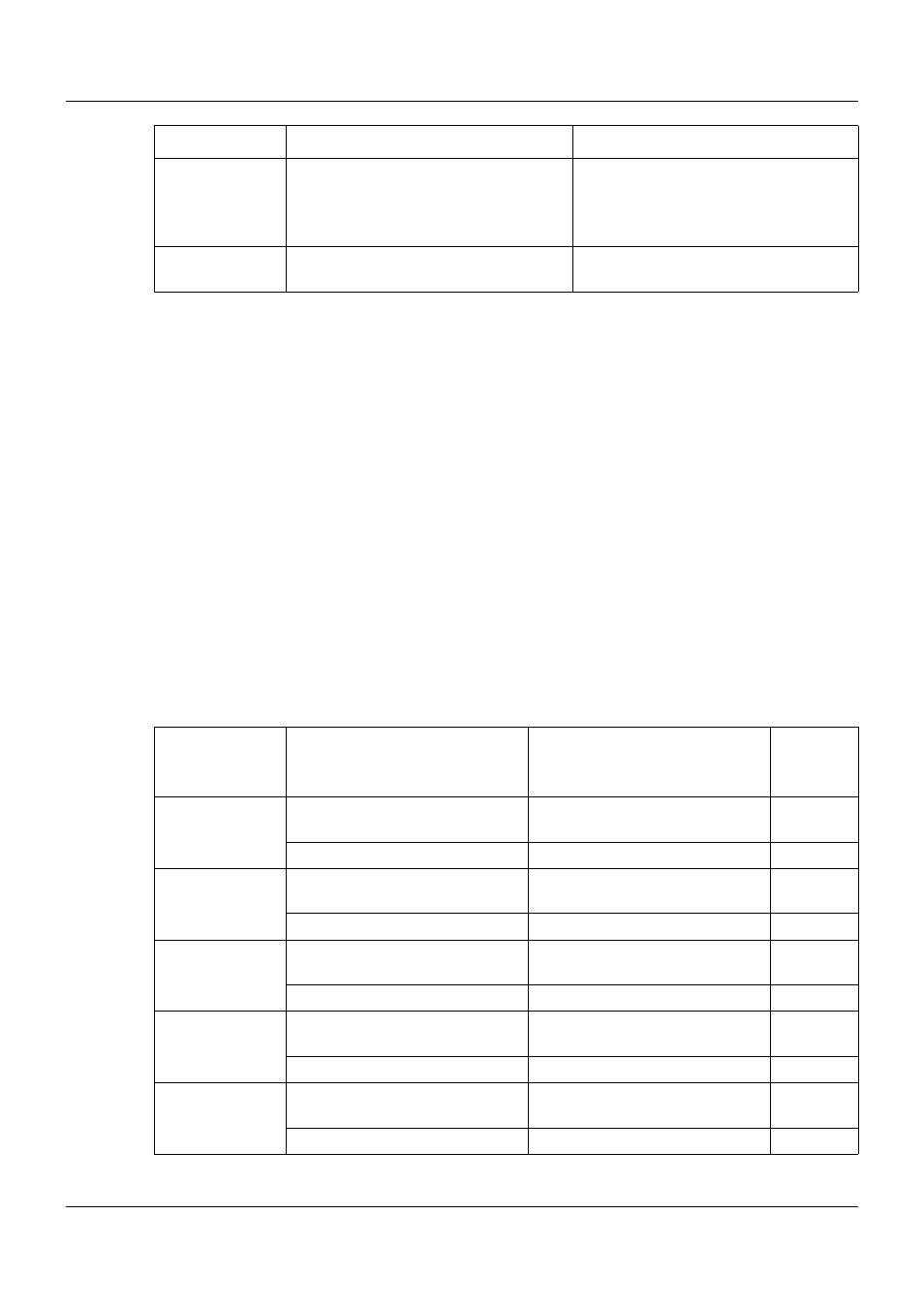
Optimized controller parameters
With both self-optimization methods, certain parameters are optimized according to the config-
ured controller type and configured parameters. The controller structure is derived from the
type of the optimized parameters: Proportional band Xp (P component), derivative time Tv (D
component), and reset time Tn (I component).
The cycle time Cy and the filter time constant dF are also optimized.
Start tune
Digital selector (Inactive)
Signal (high-active) for starting self-opti-
mization
Requirement: Self-optimization must be
generally permitted.
Stop tune
Digital selector (Inactive)
Signal (high-active) for aborting self-
optimization
Parameter
Selection/settings
Description
Configured con-
troller type
Configured parameter
Optimized parameter
Optimized
controller
structure
Two-state control-
ler
Xp1 = any;
Tv1 = 0; Tn1
0
Xp1, Tn1, Cy1, dF
PI
All other settings
Xp1, Tv1, Tn1 Cy1, dF
PID
Three-state con-
troller
Xp1 = Xp2 = any;
Tv1 = 0; Tn1
0
Xp1, Xp2, Tn1, Cy1, Cy2, dF
PI
All other settings
Xp1, Xp2, Tv1, Tn1, Cy1, Cy2, dF PID
Modulating con-
troller
Xp1 = any;
Tv1 = 0; Tn1
0
Xp1, Tn1, dF
PI
All other settings
Xp1, Tv1, Tn1, dF
PID
Continuous con-
troller
Xp1 = any;
Tv1 = 0; Tn1
0
Xp1, Tn1, dF
PI
All other settings
Xp1, Tv1, Tn1, dF
PID
Position control-
ler
Xp1 = any;
Tv1 = 0; Tn1
0
Xp1, Tn1, dF
PI
All other settings
Xp1, Tv1, Tn1, dF
PID