NORD Drivesystems BU0180 User Manual
Page 177
9 Additional Information
BU 0180 GB-0914
Pre-series version
177
1
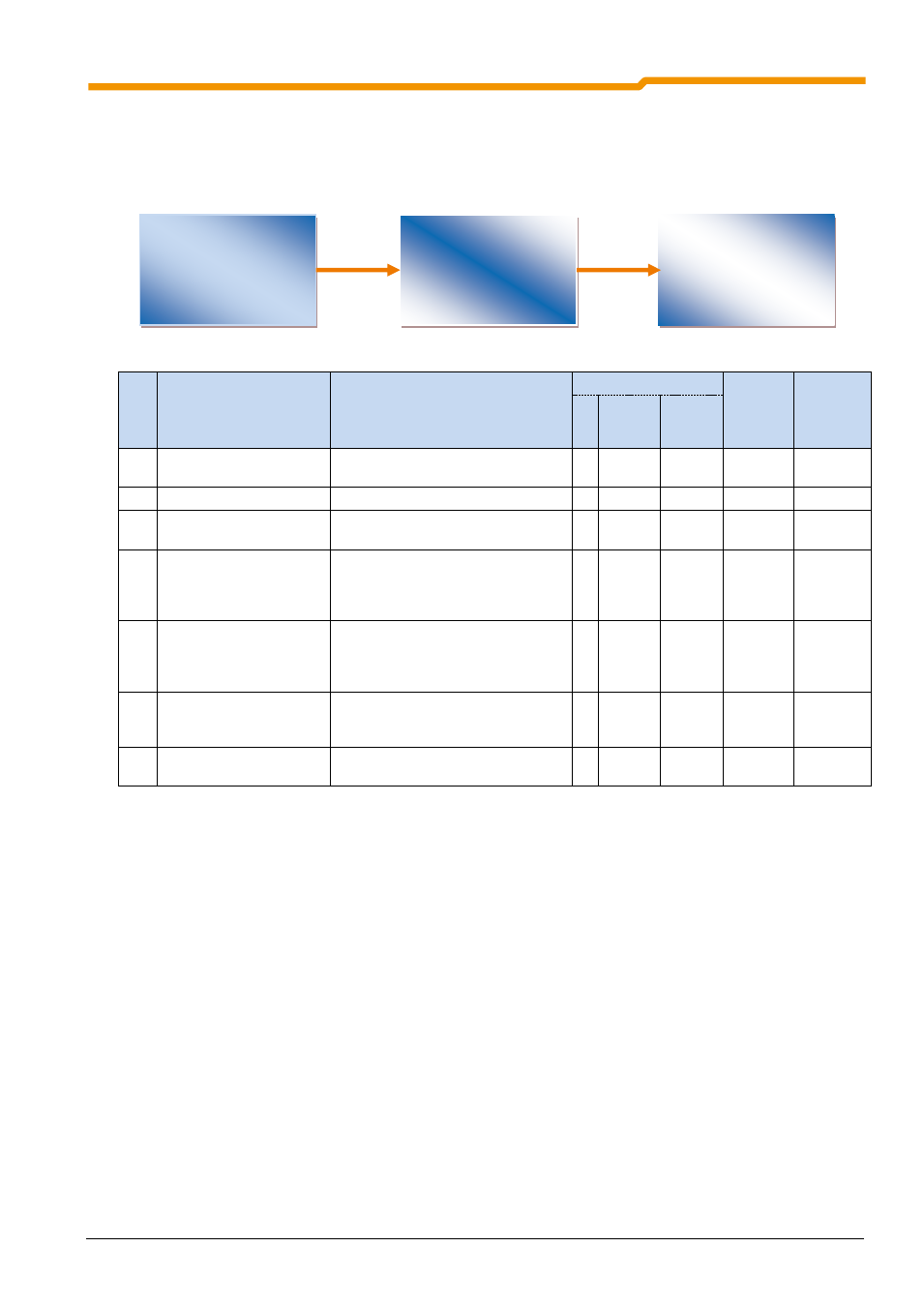
Setpoint source and
setpoint selection
2
Signal processing
and ramp
3
Control and
motor model
(determination of slip)
9.10 Definition of setpoint and actual value processing (frequencies)
The frequencies used in parameters (P502) and (P543) are processed in various ways according the
following table.
Fu
nc
tio
n
Name
Meaning
Output to ...
without
Right/
Left
with slip
1
2
3
8
Setpoint frequency
Setpoint frequency from setpoint
source
X
1
Actual frequency
Setpoint frequency for motor model
X
23
Actual frequency with
slip
Actual frequency at motor
X
X
19
Setpoint frequency
master value
Setpoint frequency from setpoint
source
Master value
(free from enable correction)
X
X
20
Setpoint frequency n R
master value
Setpoint frequency from motor
model
Master value
(free from enable correction)
X
X
24
Master value of actual
frequency with slip
Actual frequency from motor model
Master value
(free from enable correction)
X
X
X
21
Actual frequency without
slip master value
Actual frequency without slip
Master value
X