IAI America XSEL-S User Manual
Page 99
5. V
ision System I/F Function Setting
93
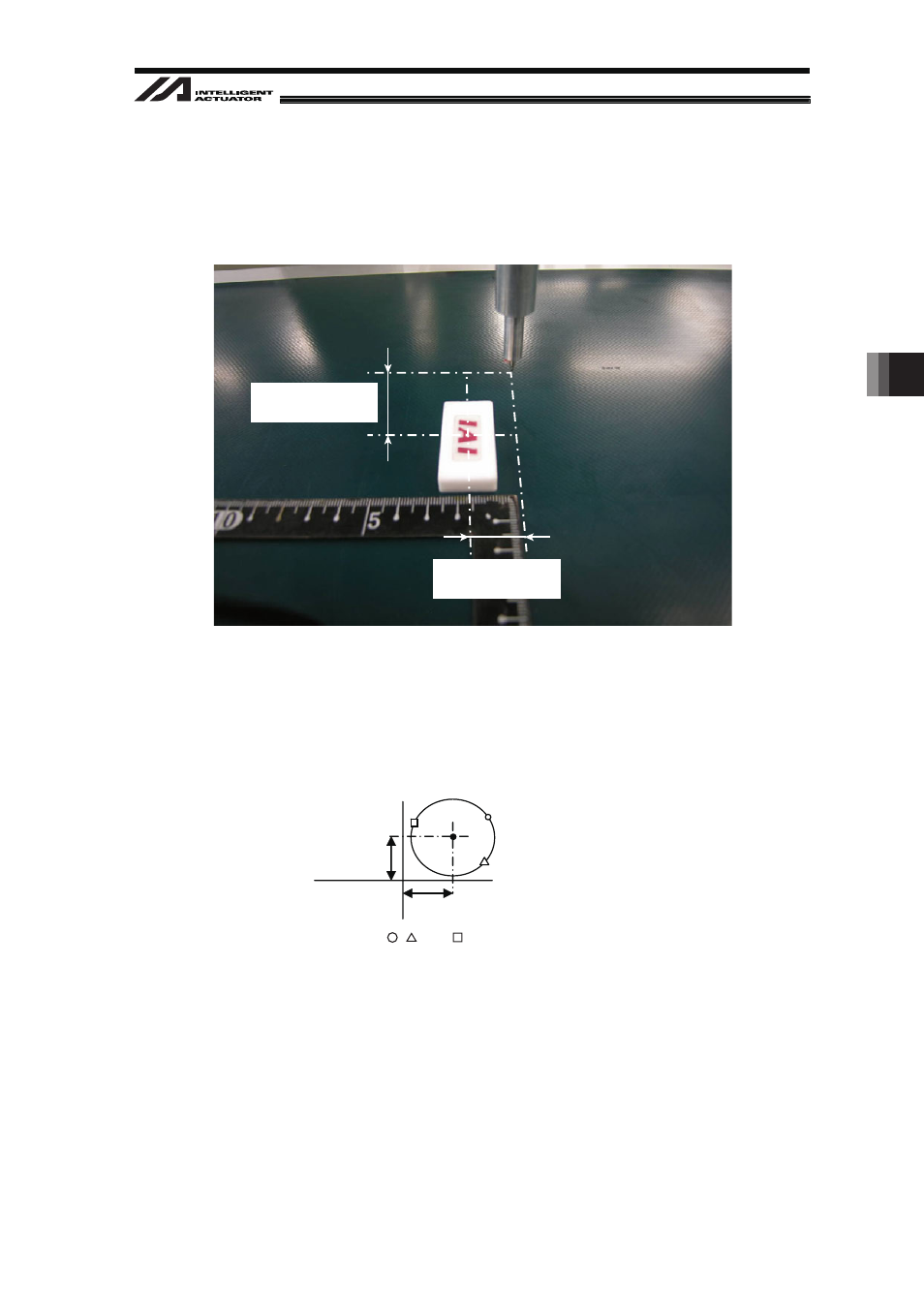
5) Rotate the work piece in 180q from the posture in Step 1) and execute an operation.
6) Stop the operation once the robot reaches the point above the work piece and measure the
distance variance in X-axis and Y-axis directions from the datum point on the work piece to the
robot (and write the values down).
7) Draw a circle that goes through the points of the values noted in Steps 1) to 6) an find the
center of the circle.
It will be very easy if using CAD.
8) Figure out the difference [mm] from the origin to the center of the circle in X-axis direction and
Y-axis direction of the robot coordinates.
9) Put the value figured in Step 8) multiplied by 1000 in the parameter.
X-axes : All-Axes Parameters No.126
Y-axes : All-Axes Parameters No.127
10) Rotation axis adjustment is to be conducted by putting values to the following parameters.
Rotation axis : All-Axes Parameters No.128
Distance variance
in Y-axis
Distance variance
in X-axis
X
Y
, and are the points of variance
obtained in Steps 1) to 3).