IAI America XSEL-S User Manual
Page 18
2. W
ork Flow before Operation Start
12
2) Other Requirement of IAI Products
x
XSEL Controller
(Main application Version XSEL-P/Q : V1.05 or later
XSEL-R/S : V1.04 or later)
x
Ethernet Board
(Option … If Ethernet is used for communication between the vision system and XSEL)
x
XSEL controller PC software
(If the vision system is In-Sight EZ110 (EZ-110XL);
• XSEL-P/Q : Version V7.07.08.00 or later
• XSEL-R/S : Version V9.0.0.0 or later
(If the vision system is not In-Sight EZ110 (EZ-110XL);
• XSEL-P/Q : Version V7.06.08.00 or later
• XSEL-R/S : Version V9.0.0.0 or later
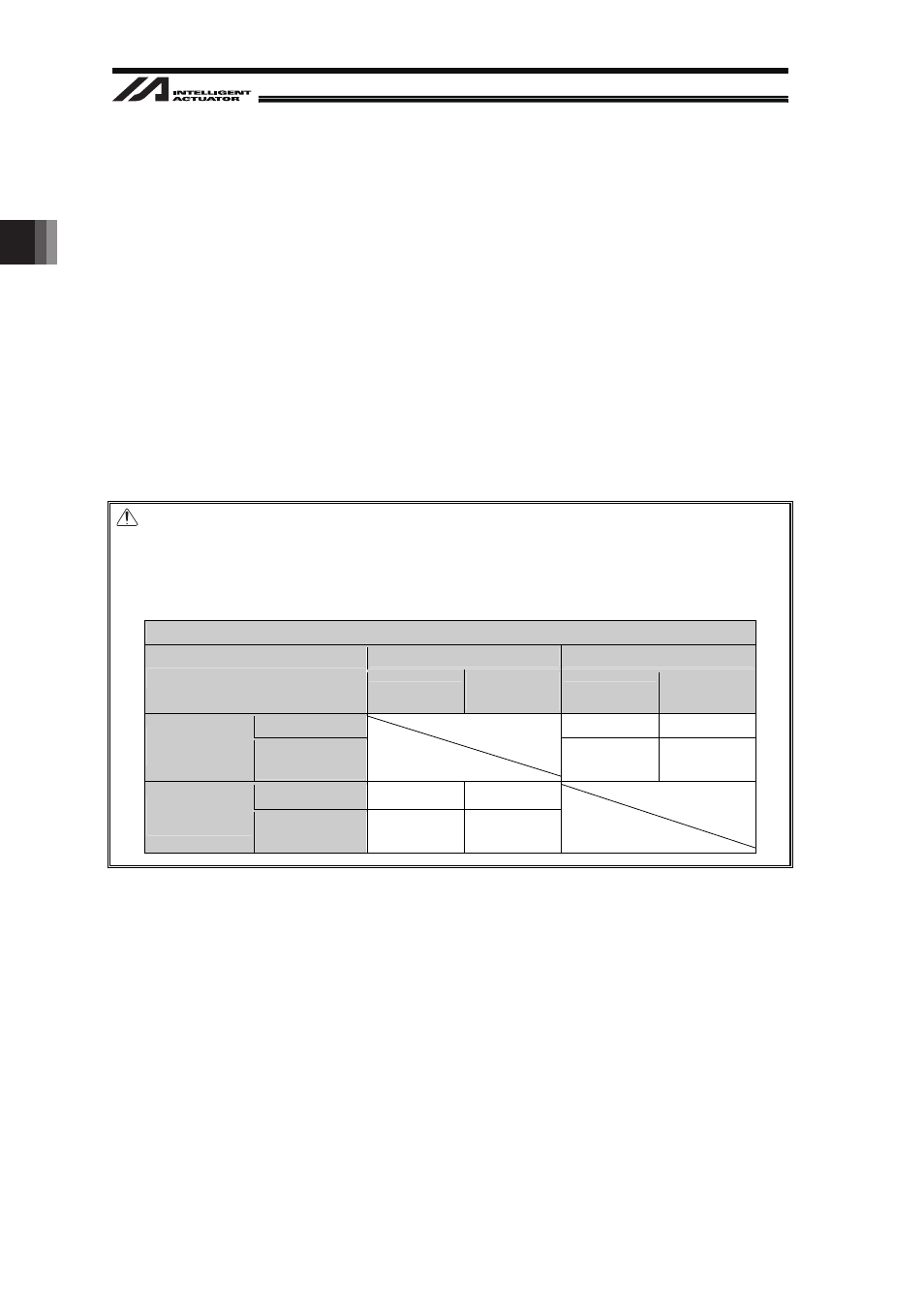
Note
When using the conveyor tracking function and the vision system I/F function at the same time, it
is not possible to have Ethernet to both of the functions as the communication interface. Connect
one of them with RS232C.
Available interface combination when using vision system
Conveyer Tracking
Vision System I/F
Interface
Ethernet
Standard SIO
(RS232C)
Ethernet
Standard SIO
(RS232C)
Ethernet
×
ż
Conveyer
Tracking
Standard SIO
(RS232C)
ż
ż
Ethernet
×
ż
Vision System
I/F
Standard SIO
(RS232C)
ż
ż
If the vision system is EZ-110XL and the dedicated software is used, the simple adjustment function
that enables to reduce the procedure of manual alignment in the matching process of the robot and
the vision system coordinates can be used.
When using the simple adjustment function, the work to be used in the adjustment process and a
tool to hold the work (chuck, grip, etc.) are necessary for the settings.