Work flow before operation start, 1 starting procedures, Check of packed items – IAI America XSEL-S User Manual
Page 16: Installation and wiring, Power supply and alarm check, Check of safety circuit actuator setting, Power-up and operation check
2. W
ork Flow before Operation Start
10
2. Work Flow before Operation Start
Note
Make sure to have the settings of the vision system such as the work detection setting and
communication setting done before having the vision system I/F function settings.
2.1
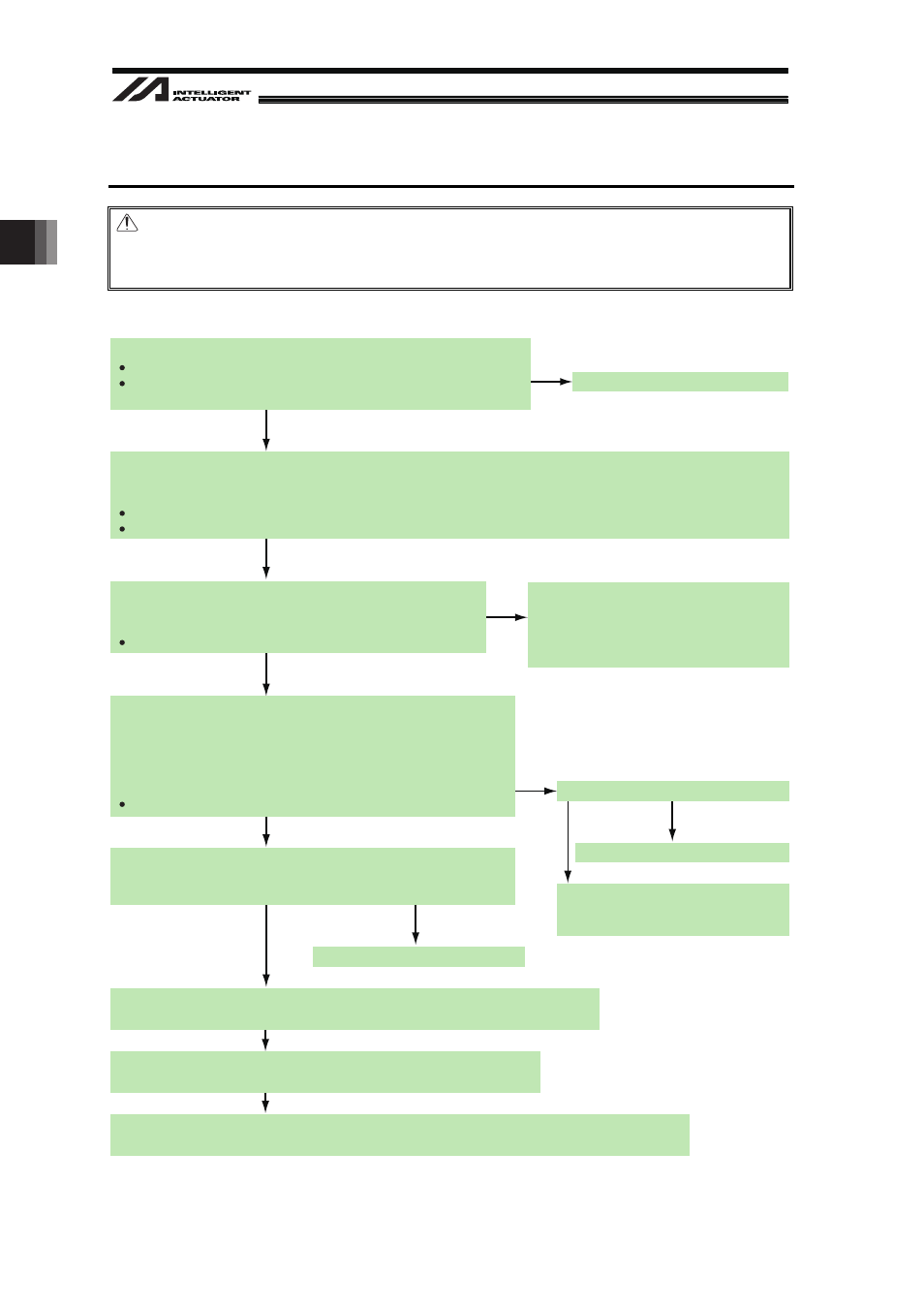
Starting Procedures
No
No
No
Yes
Check of Packed Items
Are there all the delivered items?
Do you have all the equipment listed in Section 2.2 that needs to be
prepared beforehand?
Yes
Yes
Yes
Yes
Yes
Installation and Wiring
Have the actuator and encoder installed and connected following the instructions in XSEL Controller Instruction
Manual, Actuator Instruction Manual and this manual (see Section 4).
Are the frame grounding (FG) and protection earthing (PE) conducted?
Has the noise countermeasure been taken?
Power Supply and Alarm Check
Connect the PC, put AUTO/MANU switch to “MANU” side and
turn the power on.
Is the status display showing “rdy” ?
Check of Safety Circuit
Actuator Setting
Check that the emergency stop circuit (or motor drive power cutoff
circuit) operates normally to turn off the servo.
Vision System I/F Function Setting (Refer to Section 5)
The setting details differ depending if the camera is mounted to the robot or not.
Creating Program (Refer to Section 6)
Create a program based on SEL program construction capacity.
Power-up and Operation Check
Have the program run to check the sensor input, axis data from the camera and tracking position.
Have an appropriate treatment following
the content of the status display.
[Refer to the trouble shootings in Instruc-
tion Manuals for XSEL Controller and PC
Software.]
No
Is the motor cable connected?
No
Contact the sales shop.
Connect the motor cable.
Check the emergency stop circuit.
Check the alarm content on the PC to
have an appropriate treatment if an
alarm is generated.
Write the target position to the position table.
Press the SV button in the button display for each axis in the PC
software to turn the servo on.
After the servo is on, press the HM button in the button display for
each axis to conduct a home-return operation.
Did the servo turn on and home without error?
Now, the operation adjustment is complete.
Conduct an adjustment by the system.