X-axis y-axis – IAI America XSEL-S User Manual
Page 94
5. V
ision System I/F Function Setting
88
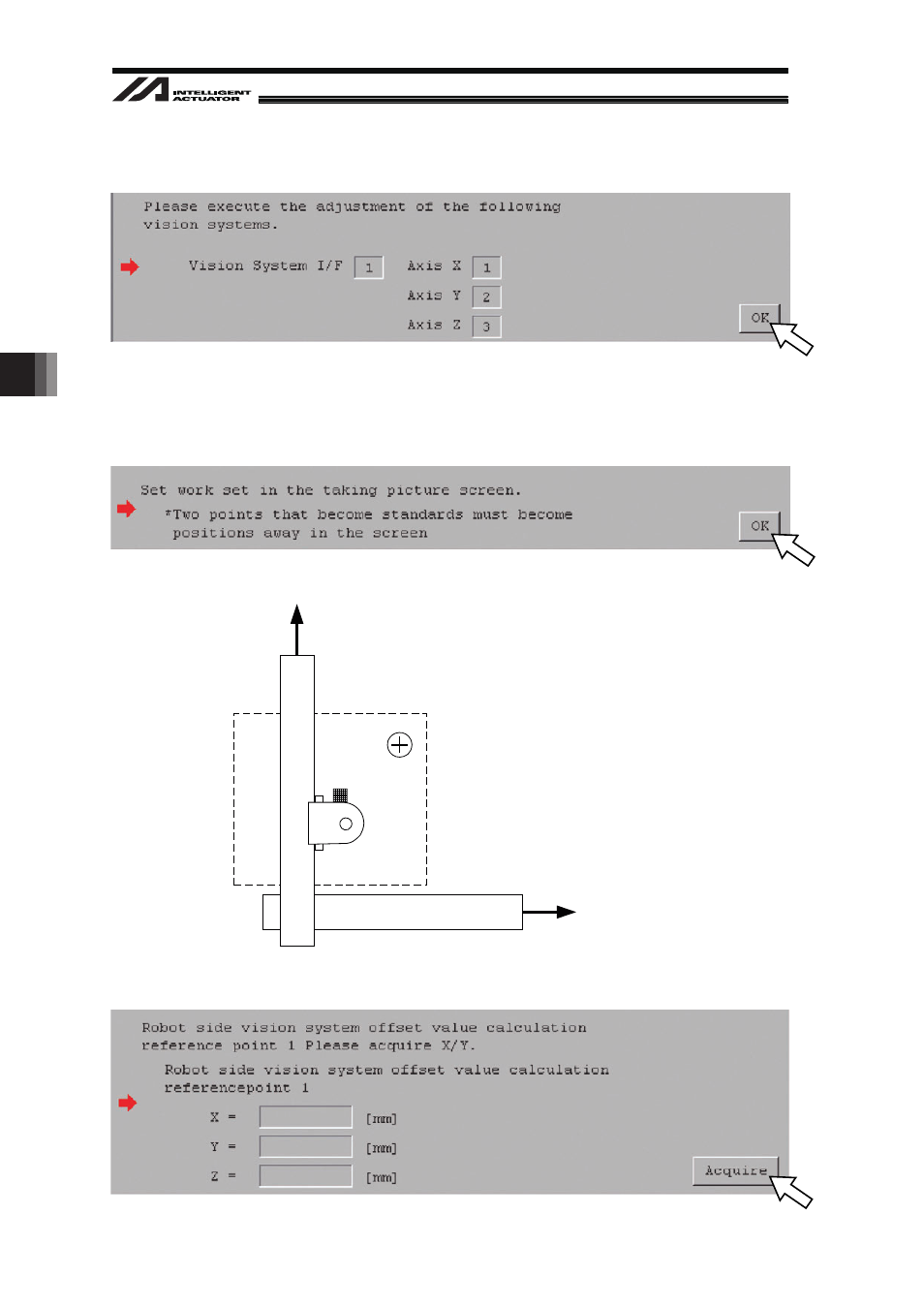
[Procedure 5] Click “OK” button.
[Procedure 6] Move the robot to a position closest to the origin within the operation range. Set the
work piece on the top left corner of the image capture range. Click “OK” button after
the setting is complete.
X-axis
Y-axis
Camera
Work
Actuator
Actuator
Camera View Range
for 1st Shot Image
[Procedure 7] Click “Acquire” button.
The current robot coordinates (X, Y and Z coordinates) are acquired.