IAI America XSEL-S User Manual
Page 40
5. V
ision System I/F Function Setting
34
[Initial Setting 4]
In this calibration, the adjustment is conducted by actually moving the work using the robot within
the image capturing range of the camera.
Therefore, it is necessary to create a program considering the method of retaining the work (gripping,
chucking, etc.). Please contact IAI for a program file you need.
Make sure to write the program for “Hold” and “Release” to the specified points.
(Note 1) The program can be edited even if the controller is not connected to the PC software
(offline).
(Note 2) Make sure to conduct the relative interlock of Hold and Release in the SEL program that
you edit.
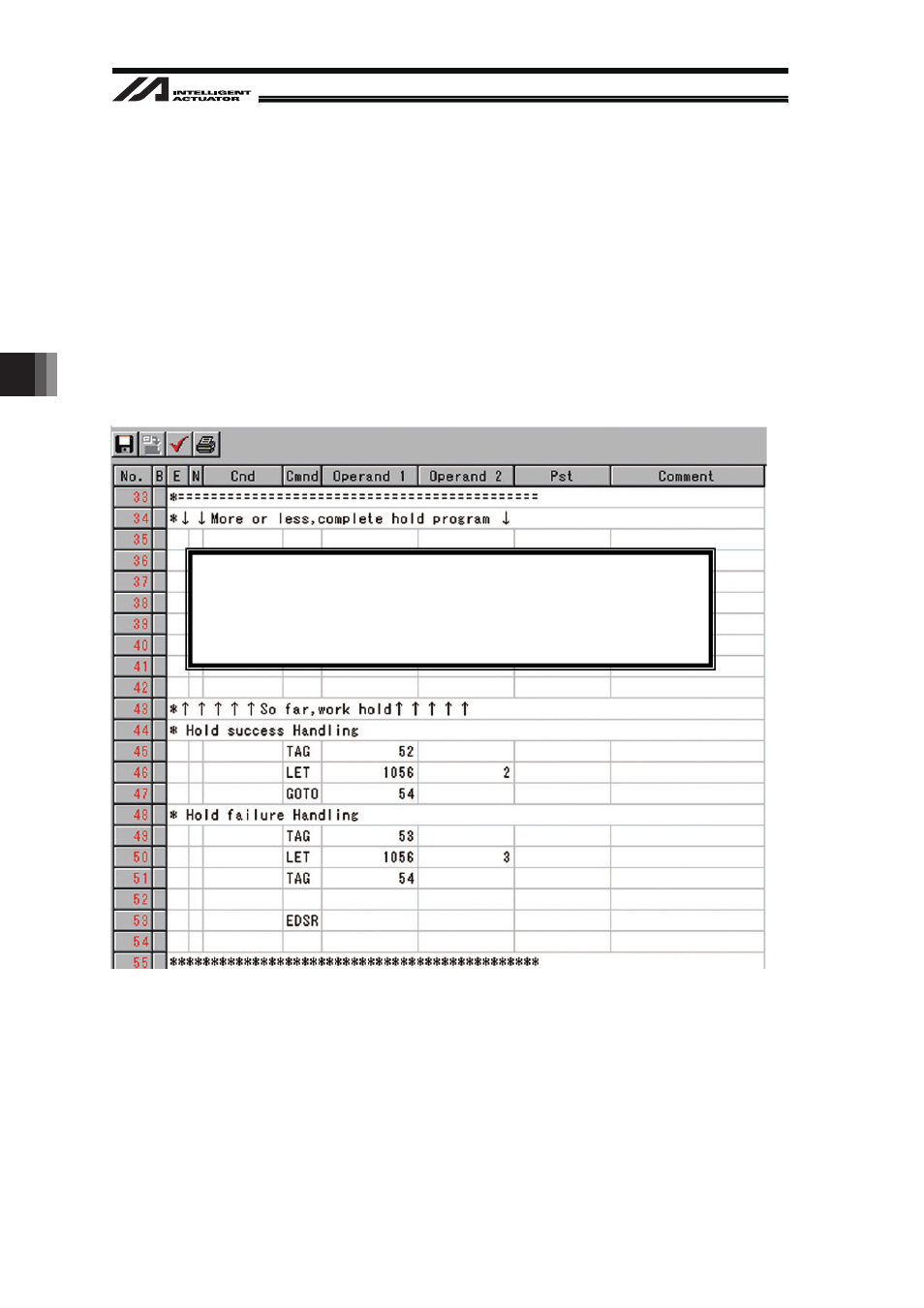
Write the program for “Hold” here
(Z-axis is lowered enough to hold the work.)
If a sensor to judge the success/fail of the hold is to be added, add;
• a command to jump to TAG 52 after success (Write GOTO 52), and
• a command to jump to TAG 53 if fail (Write GOTO 53)
(Rise of Z-axis is conducted automatically later on.)