3 operation of high speed cartesian robot (ct4) – IAI America XSEL-S User Manual
Page 124
8.
Appendix
118
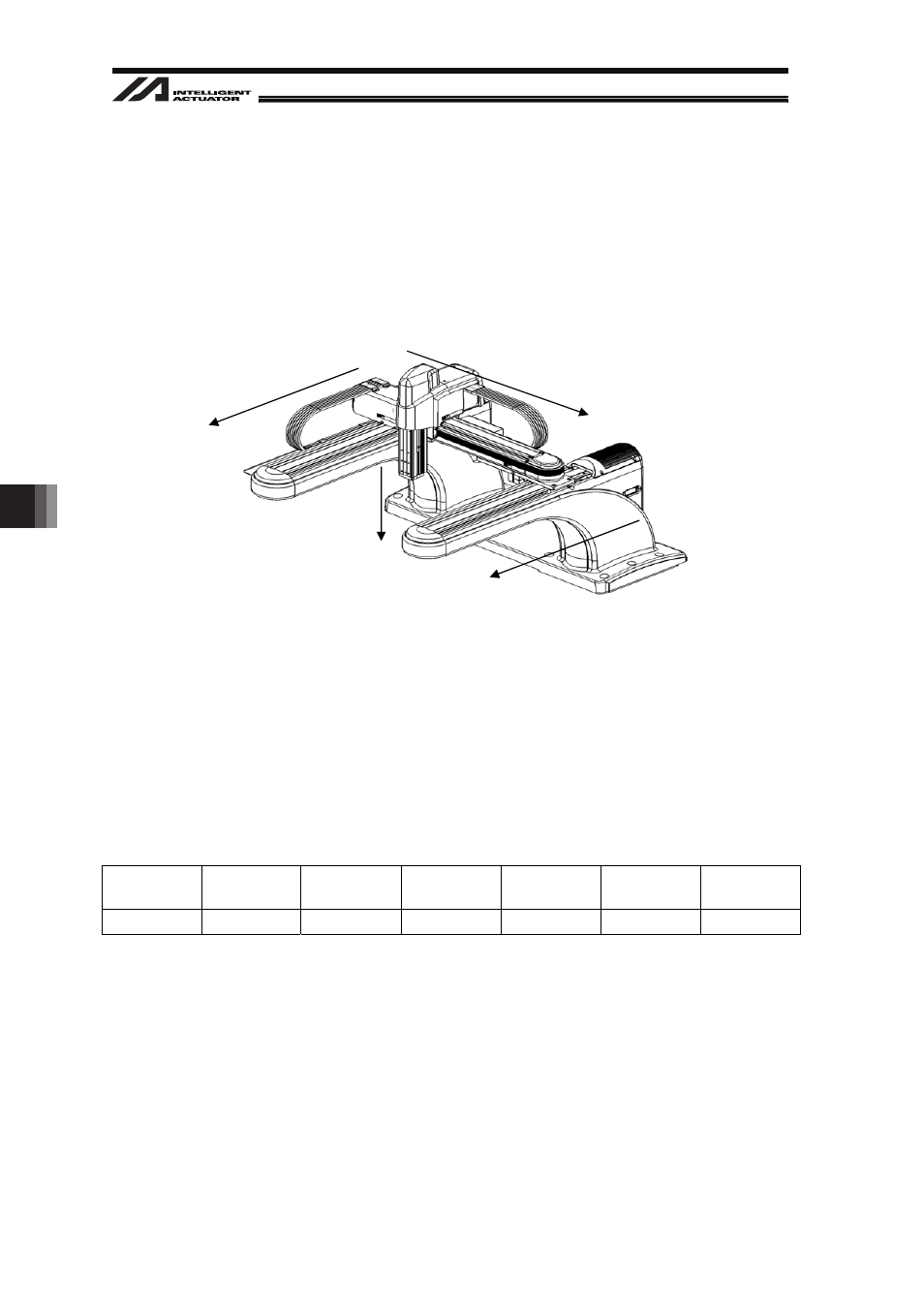
Y-axis(2
nd
-axis)
X-axis
(Synchro-Master)
(1
st
-axis)
Z-axis(3
rd
-axis)
X-axis
(Synchro-Slave)
(5
th
-axis)
8.3
Operation of High Speed Cartesian Robot (CT4)
Vision System I/F Function is a system that is to be used with the X-axis (Synchro-Master) assigned
as the 1
st
axis, Y-axis as the 2
nd
, Z-axis as the 3
rd
, rotation axis as the 4
th
and X-axis
(Synchro-Slave) as the 5
th
axis
(Note 1)
.
Note1 In case there is an additional actuator to be mounted, connection is available only on the
6
th
axis.
Shown in the figure is a standard CT4 (with no rotation axis).
The work coordinates data received from the vision system (position information) is saved to the
position data as shown below.
No.Name
Axis1
1-axis
Axis2
2-axis
Axis3
3-axis
Axis4
4-axis
Axis5
(5-axis)
Axis6
(6-axis)
1
10.000
0.000
45.000
Work X
Coordinate
ω
Work Y
Coordinate
ω
Work T
Coordinate
ω