X-axis y-axis camera, Camera view range – IAI America XSEL-S User Manual
Page 88
5. V
ision System I/F Function Setting
82
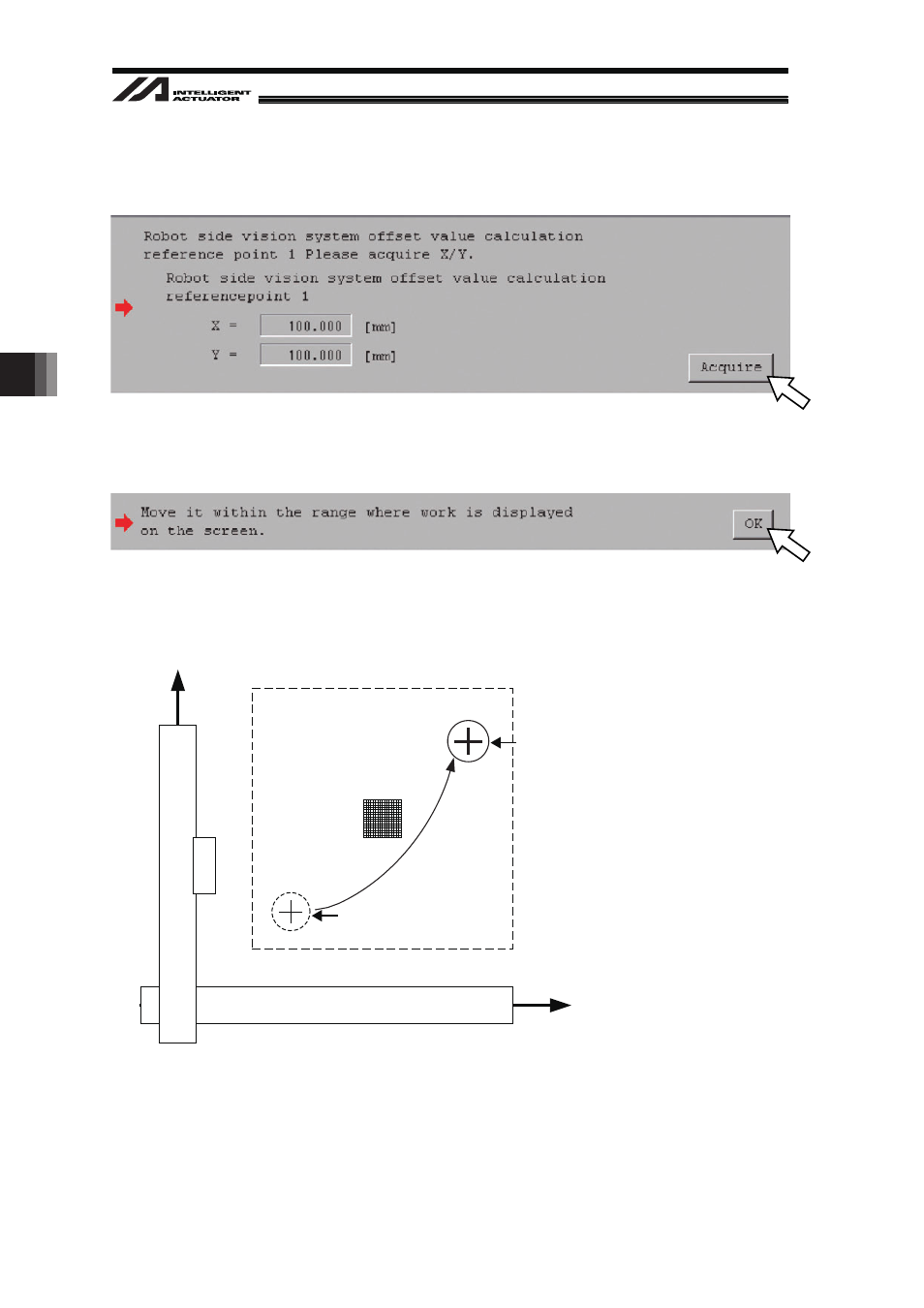
[Procedure 9] Click “Acquire” button.
The current robot coordinates (X coordinate and Y coordinate) are acquired.
[Procedure 10] Set a work piece in the range of robot operation and also the top right (refer to the
diagram below) of the image capture range, and then click “OK” button.
X-axis
Y-axis
Camera
Work
Work
Camera View Range
Work piece position
of 1st shot image (before moved)
Actuator
Actuator
Move the work piece
Work piece position
of 2nd shot image (after moved)