9 variance adjustment – IAI America XSEL-S User Manual
Page 98
5. V
ision System I/F Function Setting
92
5.9
Variance Adjustment
Perform the following procedure if the robot is OFF the position in large amount after the movement
to the point above the work piece, and then reboot the system.
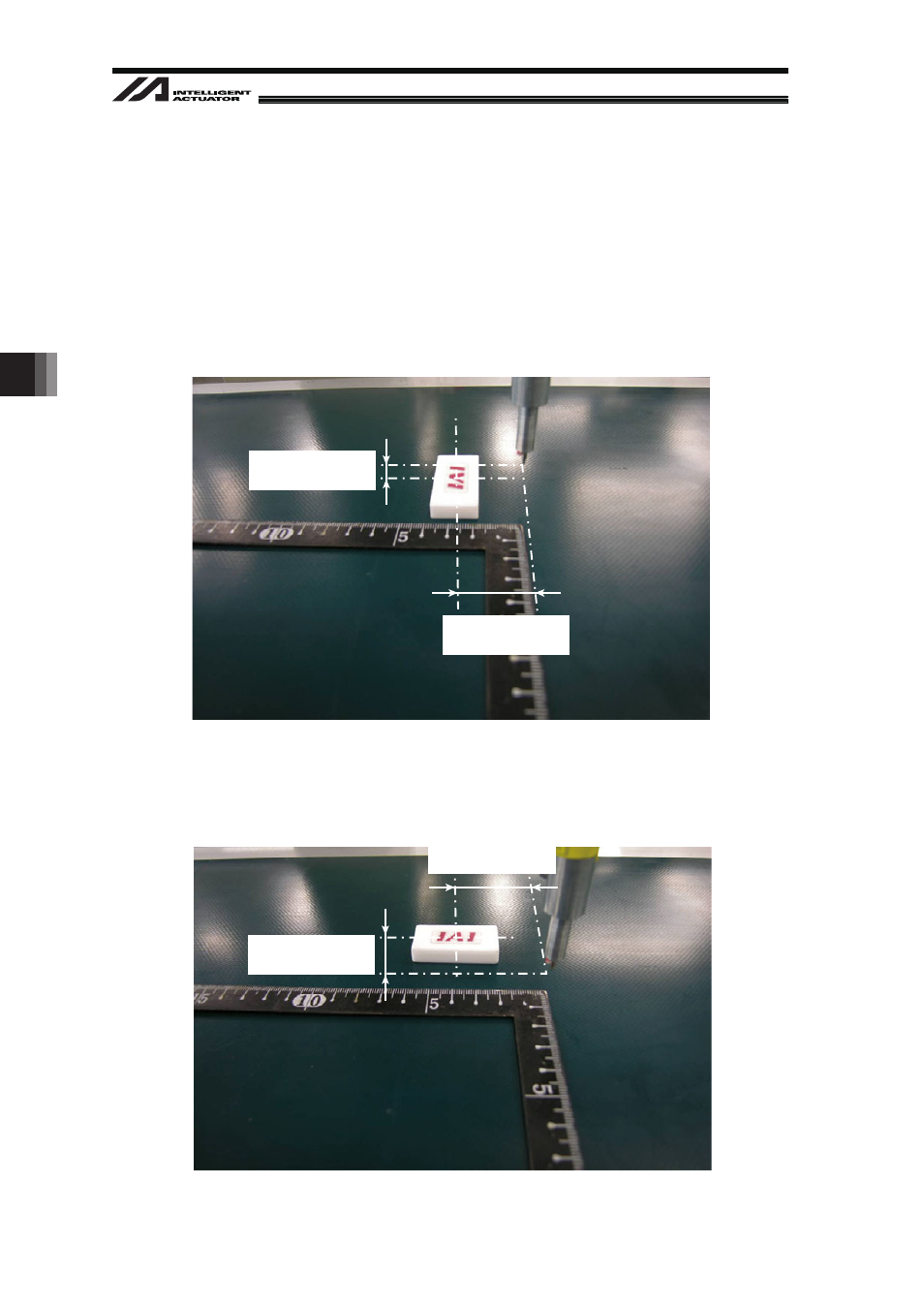
1) Set the work piece and perform an operation.
2) Stop the operation once the robot reaches the point above the work piece (Input ABPG
Command after the command to move above the work piece to stop the program), and
measure the distance variance in X-axis and Y-axis directions from the datum point on the work
piece to the robot (and write the values down).
3) Rotate the work piece in 90q from the posture in Step 1) and execute an operation.
4) Stop the operation once the robot reaches the point above the work piece and measure the
distance variance in X-axis and Y-axis directions from the datum point on the work piece to the
robot (and write the values down).
Distance variance
in Y-axis
Distance variance
in X-axis
Distance variance
in Y-axis
Distance variance
in X-axis