IAI America XSEL-S User Manual
Page 54
5. V
ision System I/F Function Setting
48
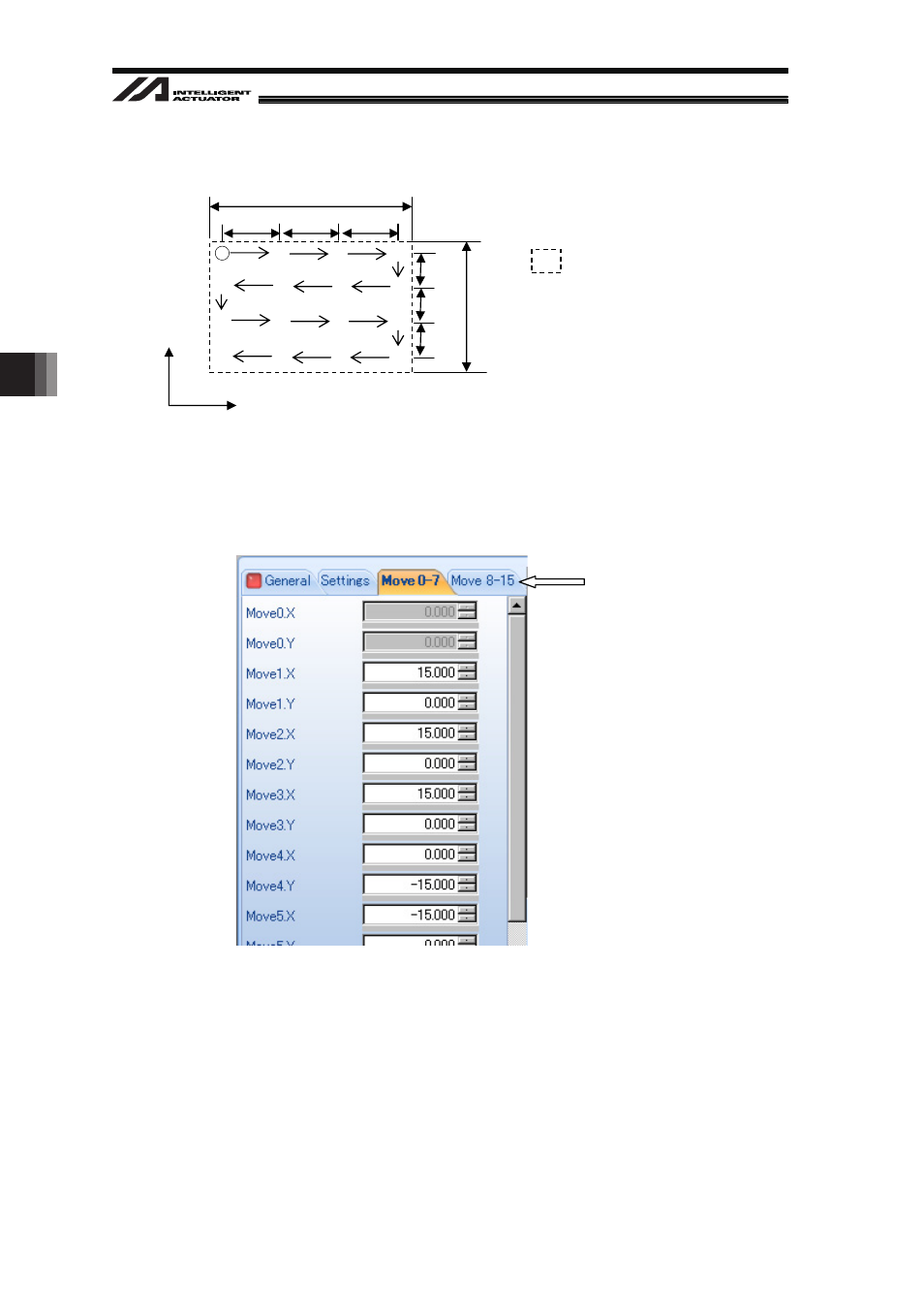
Example 2 : Number of Calibration Points = 16 points (When Camera Not Mounted on Robot)
In this example, select the Move tag and set the values as shown below for Move1.X to
Move15.Y in the right order.
Click here and the
boxes for Move 8-15
will appear.
X
Coordinates of
Vision System
Y
60mm
60mm
Ԙ
ԙ
Ԛ
ԛ
Ԣ
ԣ
Ԝ
ԝ
Ԟ
ԟ
Ԡ
ԡ
Ԥ
ԥ
Ԧ
15mm
15mm
15mm
15mm
15mm
15mm
indicates the image capturing range
(60 u 60mm)
0