Coordinates, 1 coordinate axes for orthogonal robot – IAI America XSEL-S User Manual
Page 19
3. Coordinates
13
3. Coordinates
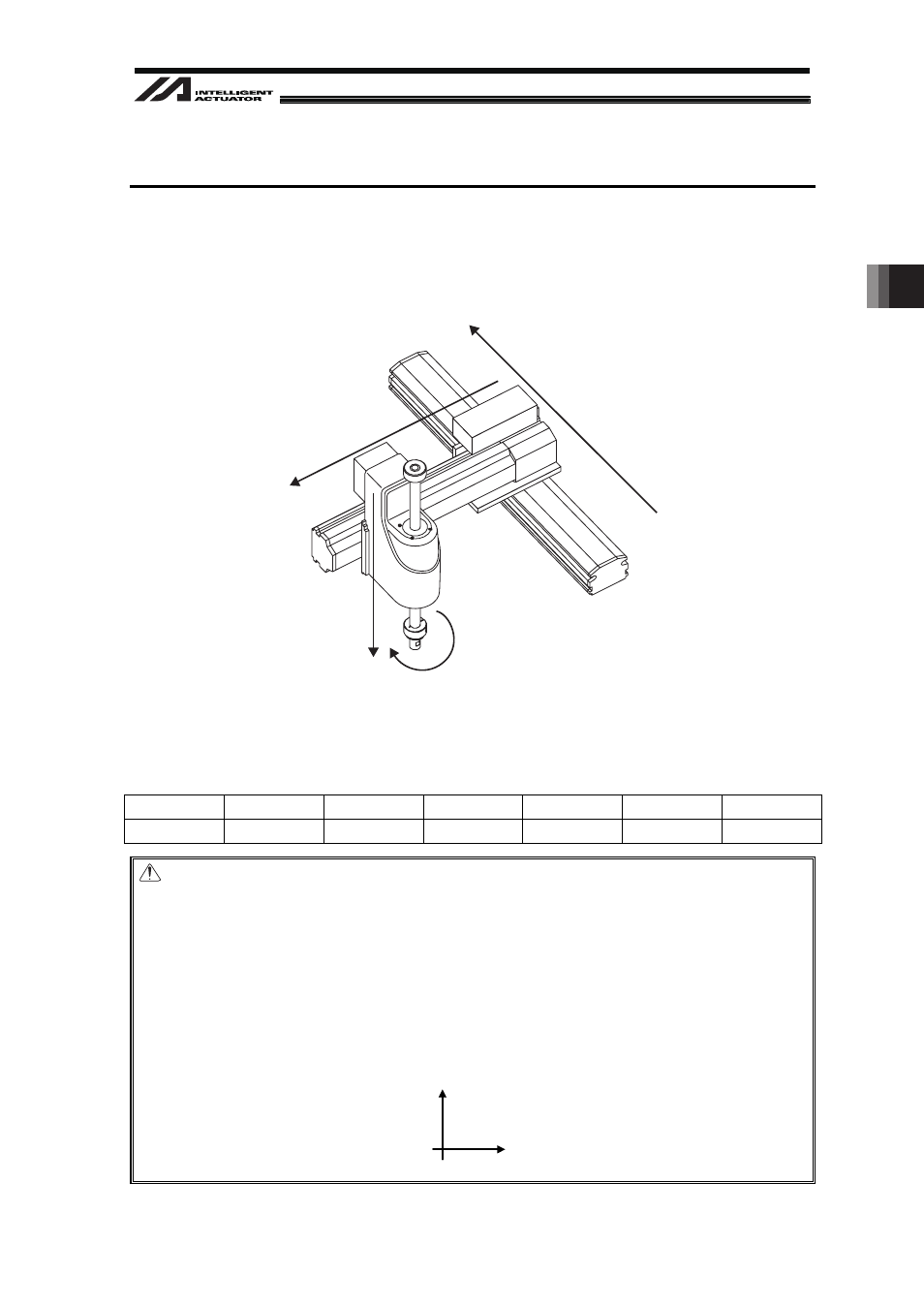
3.1 Coordinate Axes for Orthogonal Robot
The coordinate axes are fixed. (Refer to table below.)
Y-axis (2-axis)
X-axis (1-axis)
Rotary Axis (4-axis)
Z-axis (3-axis)
+
+
+
+
The work coordinates data received from the vision system (position information) is saved to the
position data as shown below.
No. (Name) Axis1 (1-axis) Axis2 (2-axis) Axis3 (3-axis) Axis4 (4-axis)
Axis5
Axis6
1 ( )
10.000
0.000
45.000
Note
x
The position data of the axes that are not indicated as the valid axis pattern (All-Axes Parameter
No.1) (invalid axes) do not get updated.
x
If there is an axis that is not to be used in Axis1, Axis2 and Axis4, declare the axis that uses the
position data in GRP Command.
x
Ensure the applied actuators lie across each other in the right angle. Failure to do so may
disable to obtain accurate work coordinate data.
x
The positive directions are premised as shown below for the robot X and Y axes coordinates.
㪯
㪰
Work X
Coordinate
ω
Work Y
Coordinate
ω
Work T
Coordinate
ω