8 vision system i/f adjustment – IAI America XSEL-S User Manual
Page 38
5. V
ision System I/F Function Setting
32
5.8
Vision System I/F adjustment
To make the relation to the robot coordinates and the vision system coordinates, adjustment
(calibration) of the vision system I/F is required.
The method of Vision system I/F adjustment differs depending on the vision system model and the
location of the camera installation.
If using EZ-110XL, “Simple Calibration” is available which enables you to reduce the steps of
manual adjustment of positions of the robot tool tip and the work. [Refer to Section 5.8.1 to 5.8.3]
In the case of using a vision system other than those mentioned above, refer to Section 5.8.4 or
Section 5.8.5.
Precautions
1) Vision system IF adjustment puts a relation of the robot X, Y and T coordinates to the vision
system coordinates. It is not applied when the center of the rotation and that of the tool to
retain the work are offset.
2) Camera cannot be mounted on the robot rotation axis.
3) Make sure to execute the vision system I/F adjustment after parameter settings are
completed.
4) For absolute type actuator, execute it after the absolute reset is completed.
5) Applicable PC software is required for the vision system I/F adjustment.
6) The vision system I/F adjustment includes steps to capture images of the work piece with the
vision system. Register the work piece to the vision system in advance so it can be detected.
Also, when using a vision system other than EZ-110XL, unit conversion (from pixel to mm) is
to be conducted on the camera controller side.
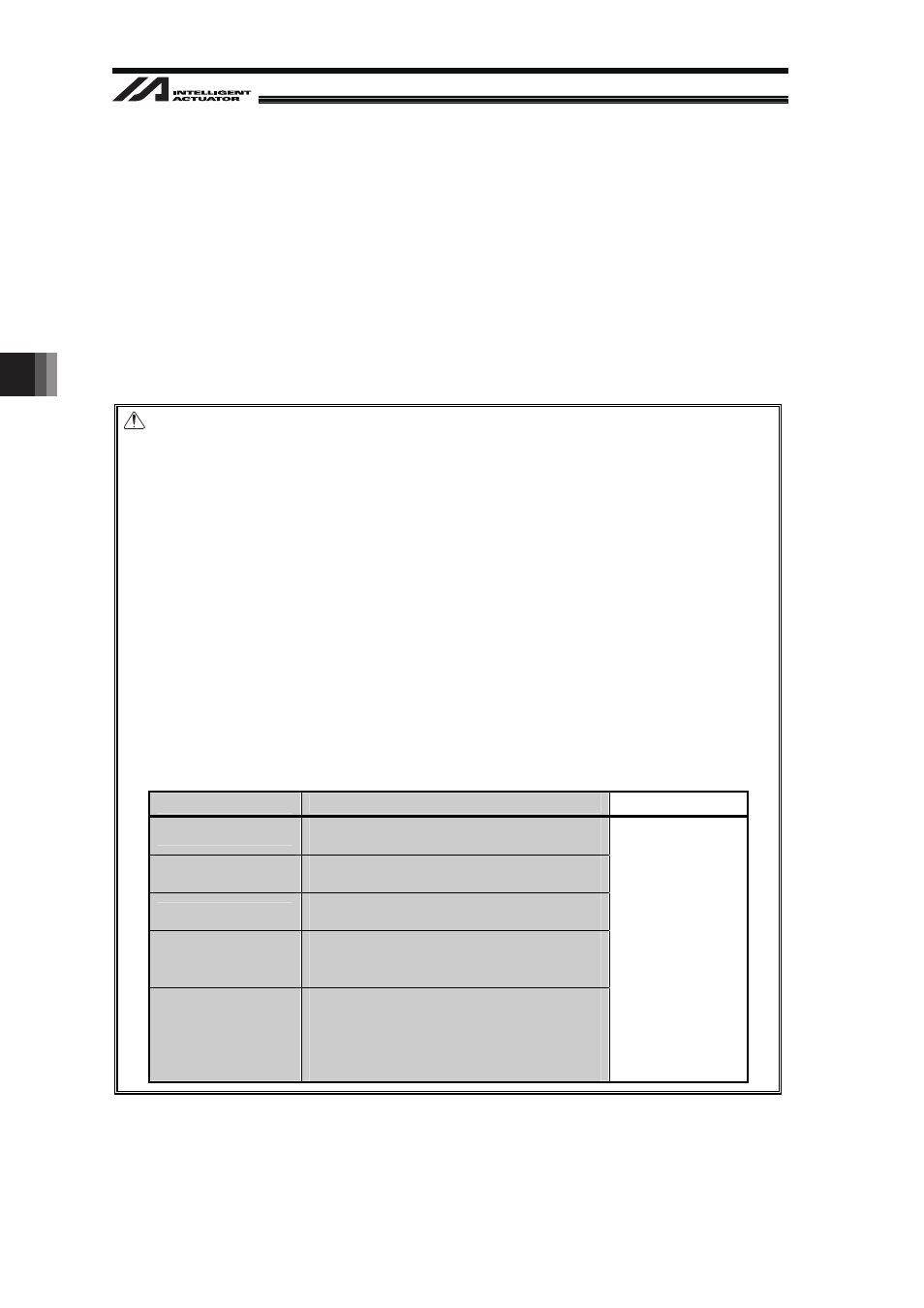
7) The following parameters are updated automatically by executing the vision system I/F
adjustment. It is no need to change them manually.
All-Axes Parameters
Description
No.122
Vision System I/F 1 Coordinate Datum Point
Offset X
No.123
Vision System I/F 1 Coordinate Datum Point
Offset Y
No.124
Vision System I/F 1 Coordinate Datum Point
Offset Angle
No.125
Vision System I/F 1 Robot Vision Mounted
Z-axis Direction Vision Position Judgment
Datum
No.130
Vision System I/F 1 Control 2
Bits 8 to 11 Vision Installation Type
( 0 (Camera being installed on a position other
than on the robot))
( 1 (Camera being installed on the robot))
Updated
automatically by
execution of “Vision
System I/F
adjustment”