IAI America XSEL-S User Manual
Page 89
5. V
ision System I/F Function Setting
83
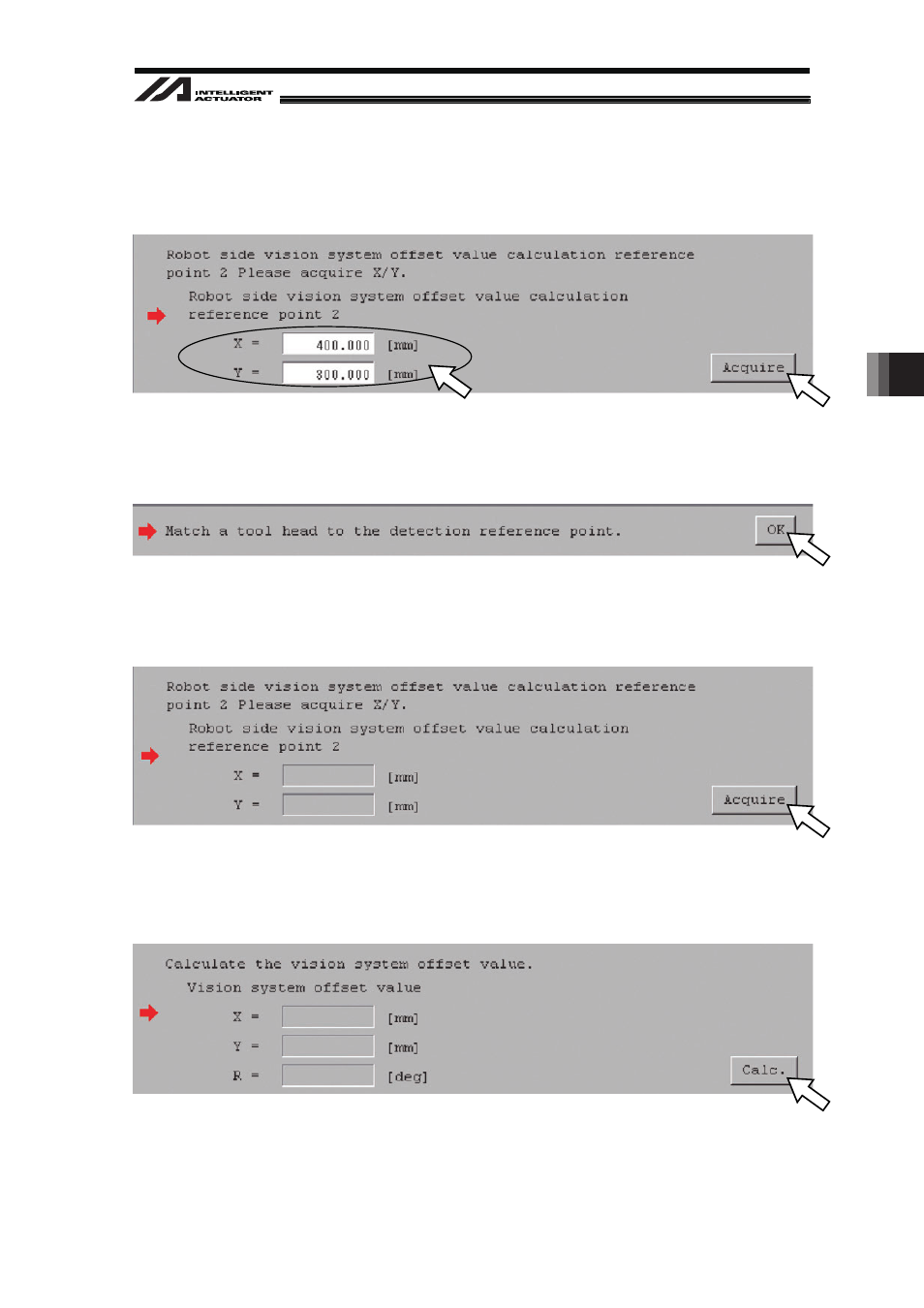
[Procedure 11] Capture an image of the work piece and input the vision system coordinates (X
coordinate and Y coordinate) detected on the vision system side. After inputting,
click “Acquire” button.
[Procedure 12] Match a tool head to the detection reference point.
Click “OK” button.
[Procedure 13] Click “Acquire” button.
The current robot coordinates (X coordinate and Y coordinate) are acquired.
[Procedure 14] Click “Calc.” button.
The result of the vision system offset value calculation is displayed.