X-axis y-axis, Actuator – IAI America XSEL-S User Manual
Page 95
5. V
ision System I/F Function Setting
89
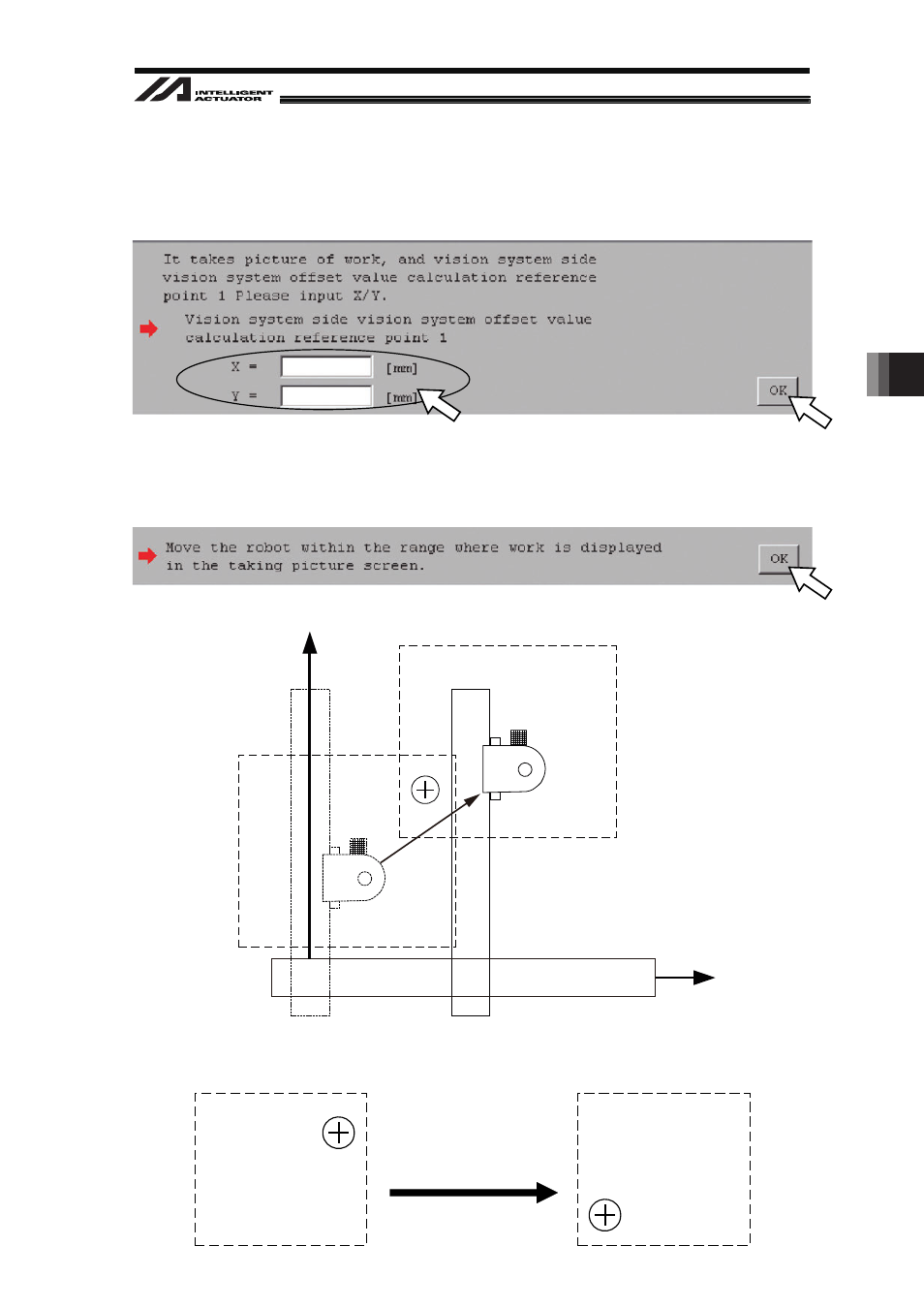
[Procedure 8] Capture an image of the work piece and input the vision system coordinates (X
coordinate and Y coordinate) detected on the vision system side. After inputting,
click “OK” button.
[Procedure 9] Move the robot so the work piece is placed on the bottom right corner of the image
capture range.
Click “OK” button after it is moved.
Actuator
Camera
X-axis
Y-axis
Camera
Work
Actuator
Camera View Range
for 1st Shot Image
Camera View Range
for 2nd Shot Image
Move
the
Robot
Work Position in
Camera View Range
for 1st Shot
Work Position in
Camera View Range
for 2nd Shot
Work piece is not to be
physically moved.
Work
Work