Installation 15, Example for vision system wiring (keyence) – IAI America XSEL-S User Manual
Page 21
4. Installation
15
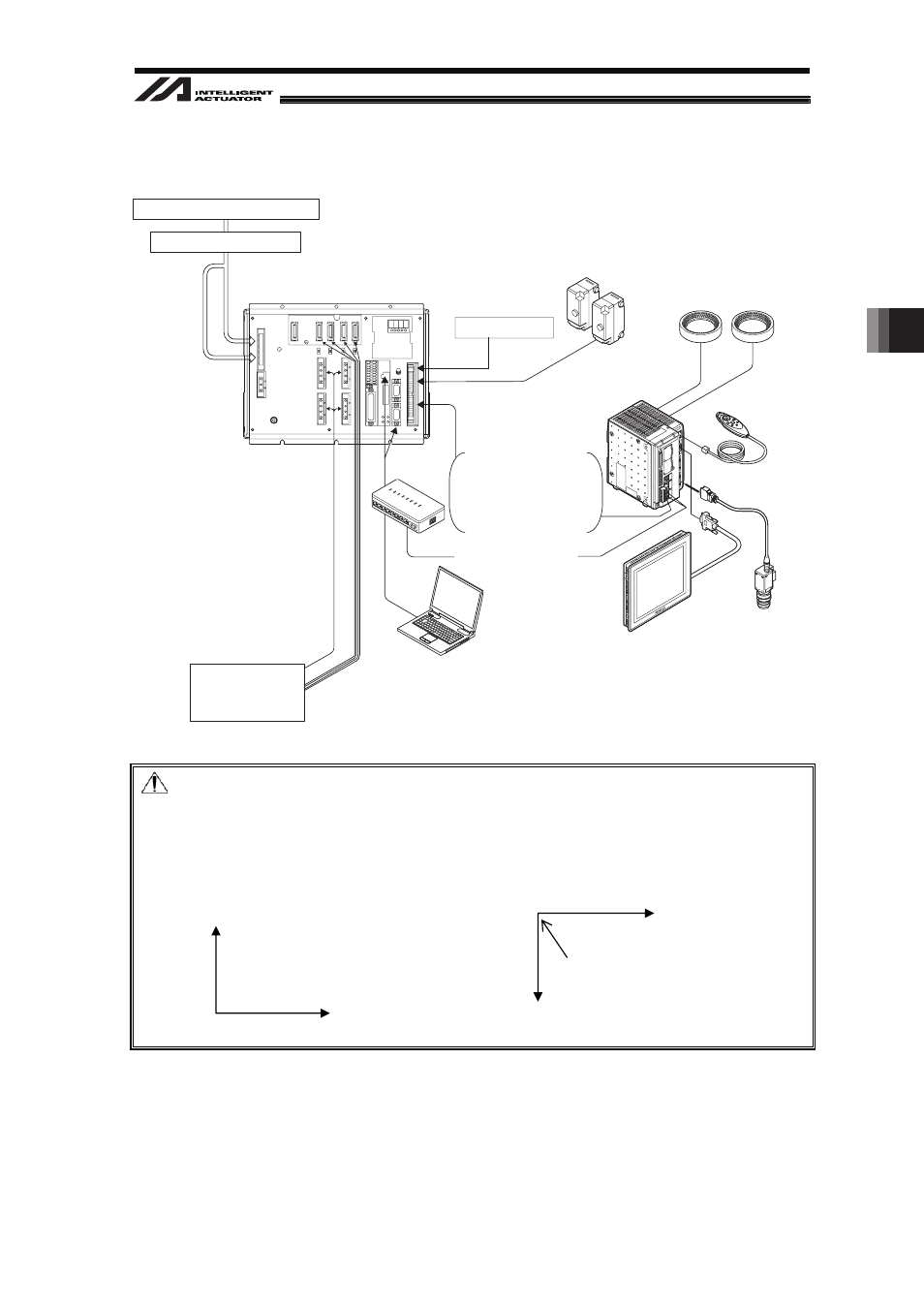
4.1.2 Example of wiring layout when connecting Keyence camera
Example for Vision System Wiring (Keyence)
Note:
• 24V I/O signal (PIO) is used for the capture command to the camera. Use the dedicated I/O
cable for the vision systems if it is equipped with a dedicated cable.
• Set the robot axis and the vision system axes directions so the X-axes are orienting the same
direction and Y-axes the opposite. Also, allocate the vision system origin to the top left of the
screen.
Robot Axes
Vision System Axes
Y
X
Y
X
Allocate the origin to top
left of screen
Power Supply Supprtive Circuit
PIO Signals (2 signals)
• Camera Controller
Startup Complete Signal
(Camera Controller→XSEL)
(Note 1)
• Image Capturing Command
(XSEL→Camera Controller)
Ethernet or RS232C
(Note 2)
M Cable
Robot
Monitor
Camera
PC
Hub
+24V
3-phase 200V AC to 230V power supply
Brake and
Power Supply for I/O
Power Supply
Work Detection Sensor
(when applied as the image-capture trigger)
Light
Console
Camera Controller
Main Body
(Note 1)
(Note 2)
The setting not to use the camera controller startup signal is
also available. (It is described later.)
There is no need for a hub for RS232C connection.
Refer to the Appendix at the end for wiring on XSEL side.
Refer to the Instruction Manual for each Vision System for
wiring on camera controller side.