IAI America XSEL-S User Manual
Page 79
5. V
ision System I/F Function Setting
73
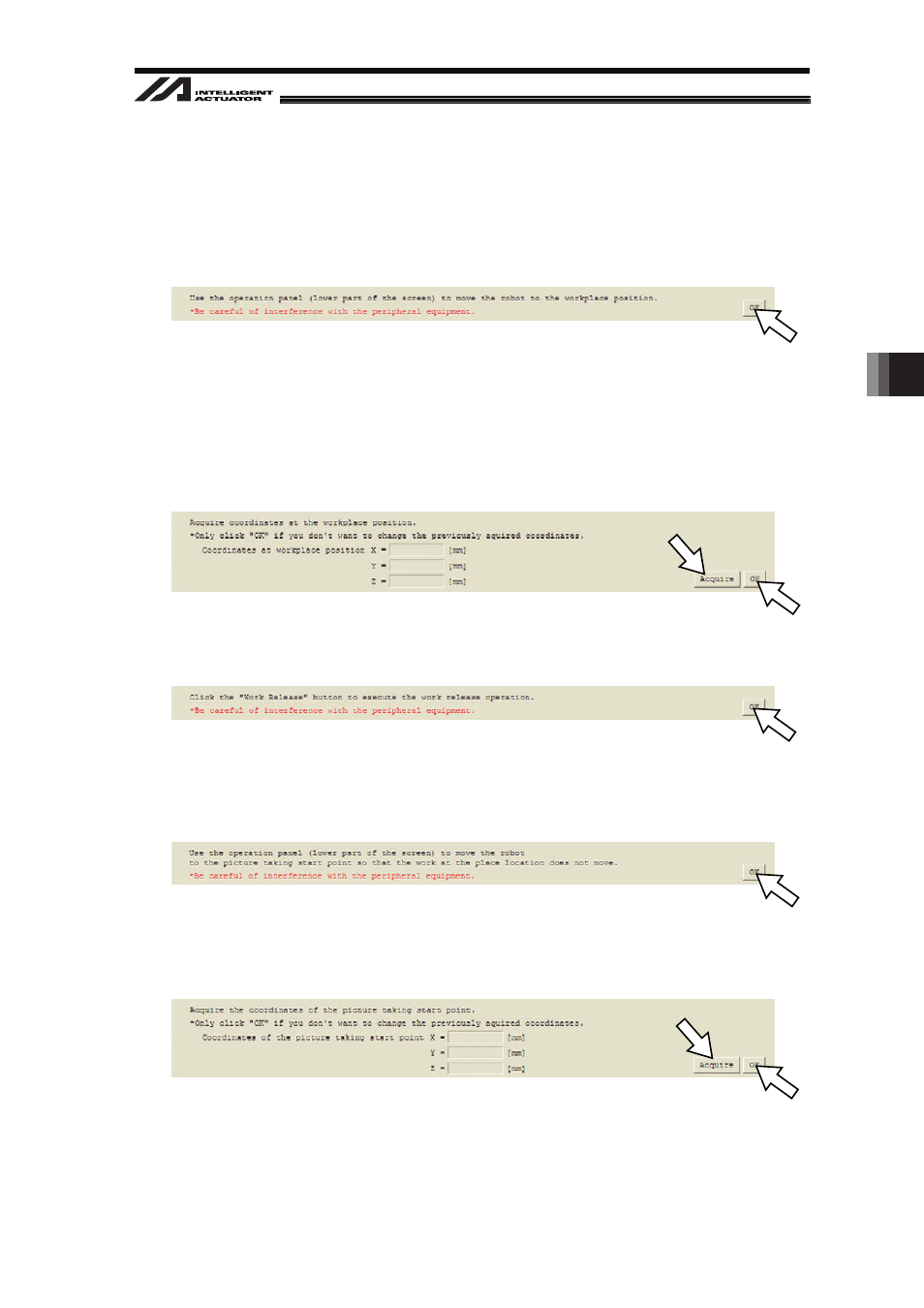
[Procedure 16] With the work held on the robot, transport it to a position near the calibration start
point (point above the position 0 set in Procedure 8 (5)).
Keep the work at the height of Z-axis where it is to be released. (Keep the work with
being held.)
Click “OK” button.
Perform the moving operation with the jog buttons at the bottom of the calibration
window. [Refer to Procedure 15]
(Note) Watch for the interference to the peripheral equipment.
[Procedure 17] Click the “Acquire” button to read the current robot coordinates.
Confirm that the current coordinates are displayed as the work placing position
coordinates and click the “OK” button.
[Procedure 18] Click the “Work Release” button to release the work.
Click “OK” button.
[Procedure 19] Move the robot to a point near the calibration start point set in Procedure 8 (5)
where the work can be captured.
Click “OK” button.
[Procedure 20] Click the “Acquire” button to read the current robot coordinates.
Confirm the current coordinates are displayed at the image capturing start point
coordinates and click the “OK” button.