IAI America XSEL-S User Manual
Page 53
5. V
ision System I/F Function Setting
47
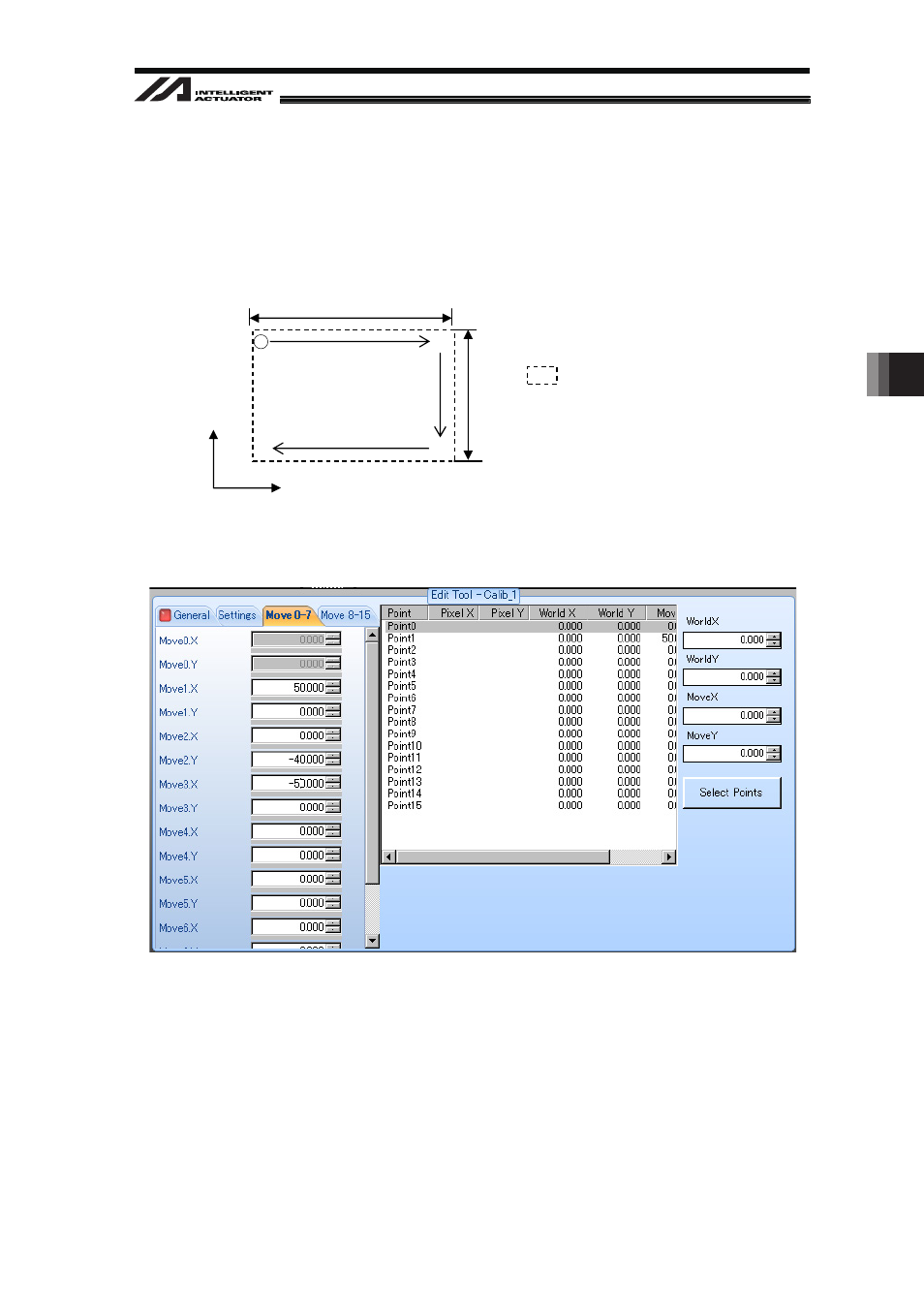
(7) Set the amount of robot movement
(Note 1 and 2)
considering the set points are in the image
capturing range.
(Note 1) The movement is relative movement.
(Note 2) In the case the camera is mounted on the robot and the case not, the movement
directions may be opposite in up/down, right/left directions.
Example1 : Number of Calibration Points = 4 points (When Camera Not Mounted on Robot)
In this example, select the Move tag and set the values as shown below for Move1.X to
Move3.Y in the right order.
indicates the image capturing range
(60 u 60mm)
X
Coordinates of
Vision System
Y
Ԙ
ԙ
Ԛ
Moves 50mm in X direction
60mm
60mm
Moves -40mm in Y direction
Moves -50mm in X direction
0