IAI America XSEL-S User Manual
Page 78
5. V
ision System I/F Function Setting
72
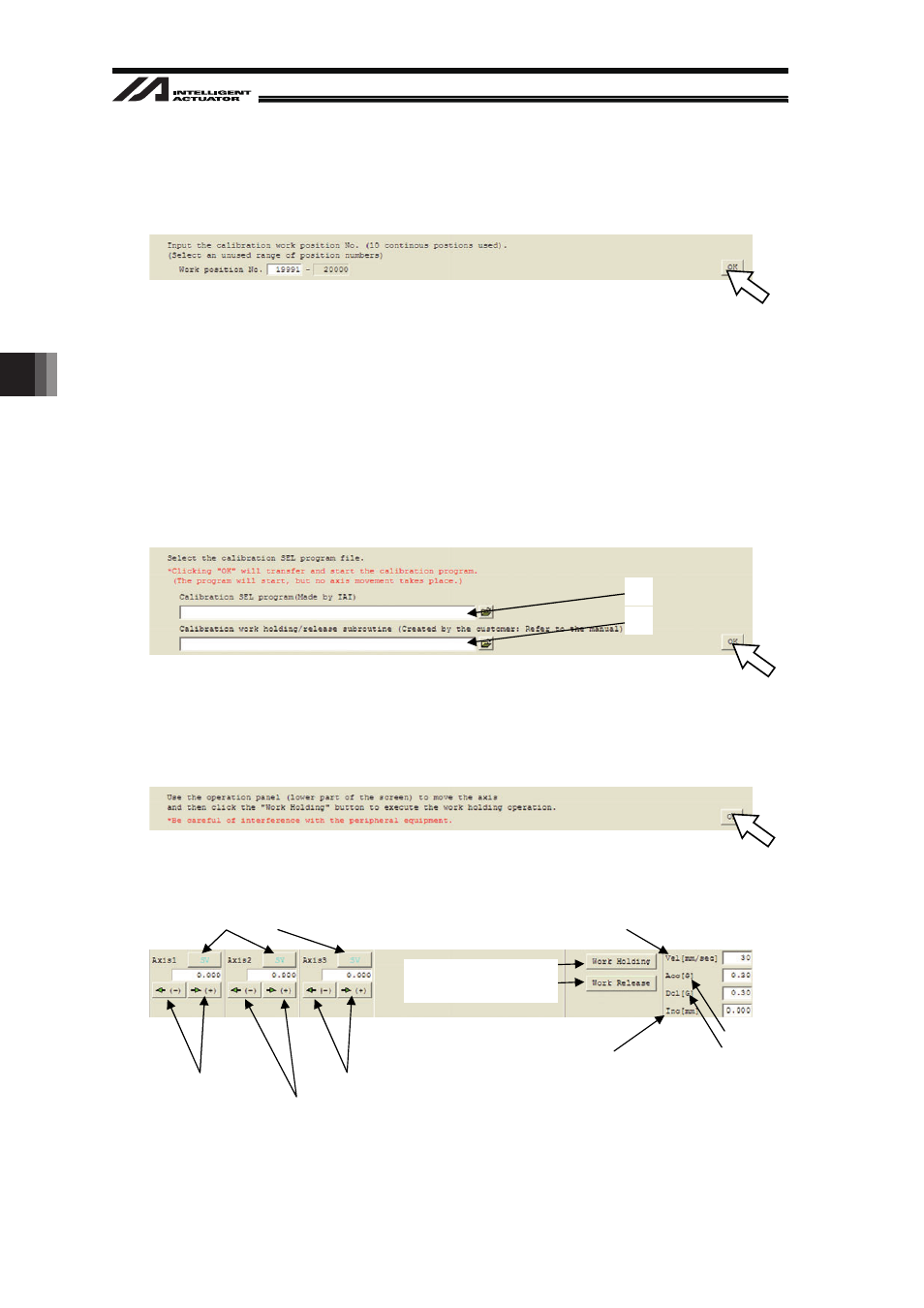
[Procedure 13] Input the position number not in use. (Select a position number that 10 positions in
a row can be ensured.)
After inputting, click “OK” button.
If all the lines are occupied, make a backup to the PC temporarily to ensure an
empty program field.
[Procedure 14] (1) Please contact IAI for a program file you need.
(2) Select the file (X-SEL-P/Q: cognex_worksub.x2pg2, X-SEL-R/S:
cognex_worksub.x4pg) as the work hold/release sub-routine for the calibration
(please prepare separately) from the data downloaded in (1) in Procedure 14.
(It is necessary to create a program which suits to the work in advance. Refer to
Section 5.8.1.)
After selecting the file, click “OK” button.
[Procedure 15] Move the robot to the position where it can hold (grip) the work.
Press the “Work Holding” button in the jog movement screen shown below to hold
the work.
(Note) Watch for the interference to the peripheral equipment.
Perform the moving operation with the jog buttons at the bottom of the calibration
window.
Servo ON Button
Jog operation buttons for 1st axis
Jog operation buttons for 2nd axis
Jog operation buttons for 3rd axis
Jog Speed
(in common with Calibration Speed)
Jog/inch switching
(Inching operation if input except 0)
Work Hold (Grip)
Work Release (Release)
Acceleration Setting
Deceleration Setting
(1)
(2)