Servo gain adjustment – IAI America XSEL-KET User Manual
Page 393
374
INTELLIGENT ACTUATOR
10. Servo Gain Adjustment
Since the servo has been adjusted at the factory according to the standard actuator specification, normally the
servo settings need not be changed.
However, vibration or abnormal noise may generate depending on how the actuator is affixed, load conditions,
and so on. Accordingly, servo adjustment parameters are disclosed so that a quick action can be taken when
necessary.
In particular, vibration or abnormal noise may generate on custom specifications (whose ball screw lead or
stroke is longer than the standard specification) due to the effects of external conditions.
In this case, the following parameters must be changed. Contact IAI.
Position gain
Axis-specific parameter number
Unit
Input range
Default value (reference)
60
/sec
0 to 9999
30
This parameter determines the response of the position control loop.
Increasing the set value improves the conformance to the position command.
However, an excessively high setting may cause the actuator to overshoot easily.
If the set value is low, conformance to the position command drops and the positioning takes a longer time.
Speed loop gain (Parameter list 1)
Driver card parameter number
Unit
Input range
Default value (reference)
38 -
0
32767
500
This parameter determines the response of the speed control loop.
Increasing the set value improves the conformance to the speed command (increases the servo rigidity).
The set value should be higher when the load inertia is larger.
However, an excessively high setting may trigger overshooting or oscillation and cause the mechanical parts to
vibrate easily.
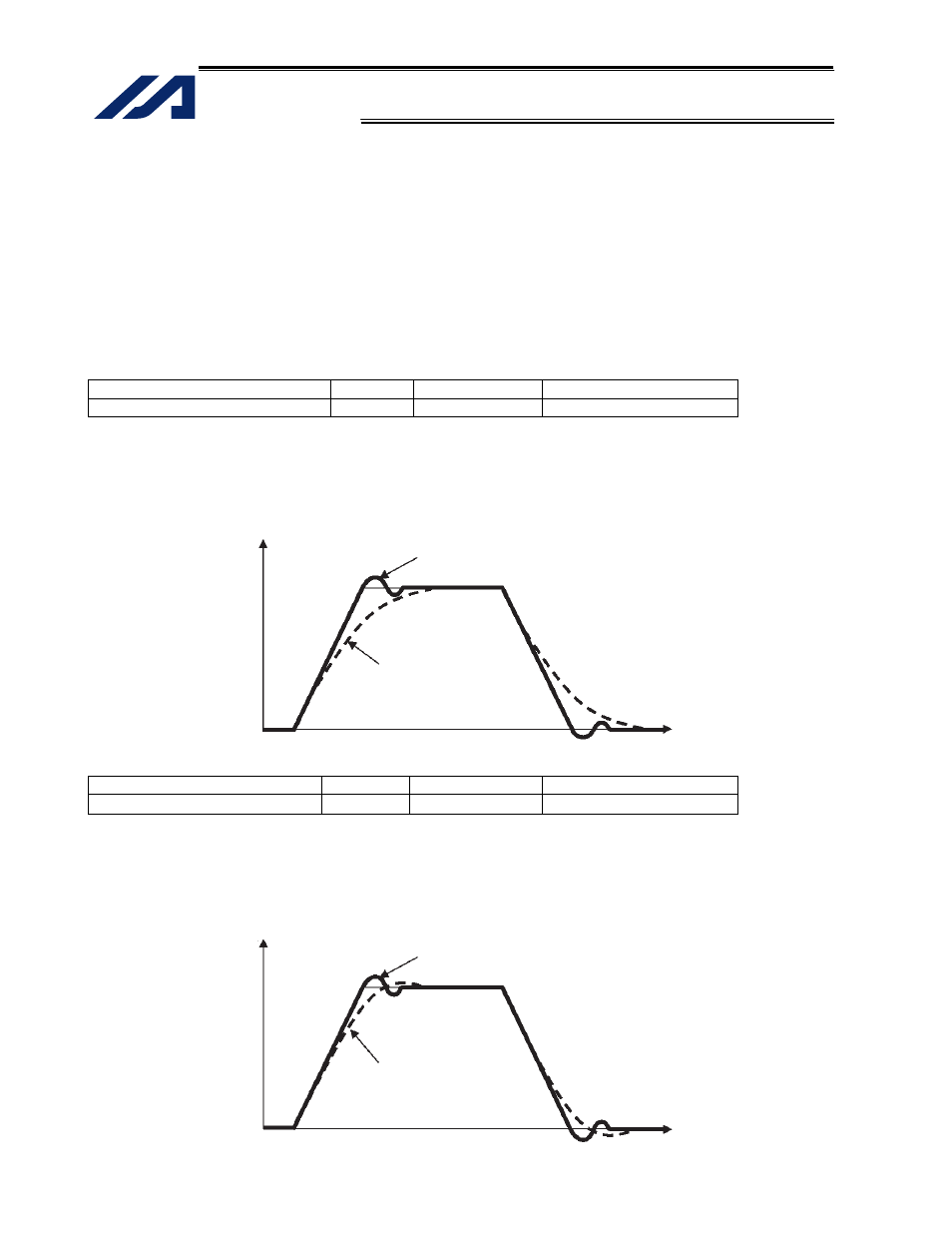
Speed
Set value is high (overshoot).
Set value is low.
Time
Speed
Set value is high (overshoot).
Set value is low.
Time