IAI America XSEL-KET User Manual
Page 197
178
Part 4 Commands
INTELLIGENT ACTUATOR
CIR2 (Move along circle 2 (arc interpolation))
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional Optional CIR2
Passing
position 1
number
Passing
position 2
number
PE
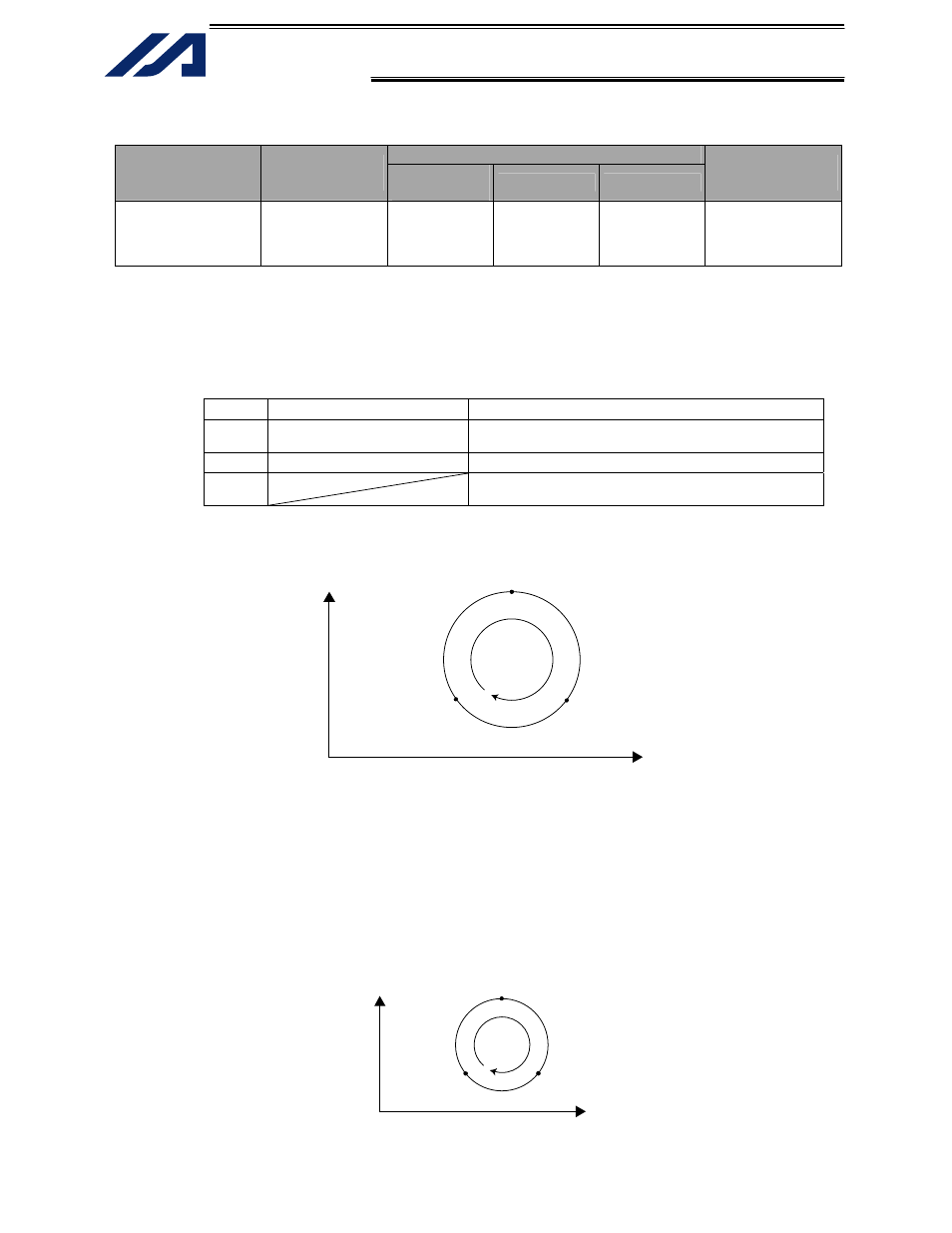
[Function]
Move along a circle originating from the current position and passing positions 1 and 2, via arc
interpolation.
The rotating direction of the circle is determined by the given position data.
The diagram below describes a CW (clockwise) movement. Reversing passing positions 1 and 2 will
change the direction of movement to CCW (counterclockwise).
The speed and acceleration will take valid values based on the following priorities:
Priority Speed
Acceleration
(deceleration)
1
Setting in the position data
specified in operand 1
Setting in the position data specified in operand 1
2
Setting by VEL command
Setting by ACC (DCL) command
3
Default acceleration in all-axis parameter No. 11
(Default deceleration in all-axis parameter No. 12)
If speed is not set, a “C88 speed specification error” will generate.
If acceleration/deceleration is not valid, a “C89 acceleration/deceleration specification error” will
generate.
(Note 1)
This command is valid on arbitrary orthogonal planes. (Axis 2 may be selected automatically prior to
axis 1 in accordance with the position data.)
(Note 2)
If the interval between the position origin and passing position 1 or between passing position 1 and
passing position 2 is small and the locus runs near a soft limit, “Error No. C73, “Target-locus soft limit
over” may occur. In this case, increase the interval between each pair of positions as much as possible,
set the locus slightly on the inside of the soft limit boundary, or make other corrections.
[Example]
VEL
100
Set the speed to 100 mm/sec.
CIR2
100
101
Move along a circle (circular interpolation) passing position Nos.
100 and 101.
Passing position 1
Position origin
Axis 1
Axis 2
Passing position 2
Position No. 100
Position origin
Axis 1
Axis 2
Position No. 101