Pause – IAI America XSEL-KET User Manual
Page 325
306
INTELLIGENT ACTUATOR
Appendix
15. Pause
[Description]
Use the declaration command HOLD to pause the moving axis via an external input.
[How to use]
By declaring a HOLD command in the program, you can pause the moving axis by interruption (the axis
will decelerate to a stop).
While the HOLD signal is input, the pause applies to all movement commands in the same program (all
moving axes will decelerate to a stop).
[Use example ]
HOLD 20
A declaration to pause upon input of general-purpose input 20.
[Application]
You can specify not only an input port, but also a global flag, in operand 1 of the HOLD command.
You can also implement a pause from other program by using a global flag.
When operand 2 is used, you can also select the input signal pattern and stopping pattern.
0 = Contact a (The axis decelerates to a stop) => Same as when operand 2 is not
specified.
1 = Contact b (The axis decelerates to a stop)
2 = Contact b (The axis decelerates to a stop and then the servo turns OFF => The drive
power is not cut off)
[Note]
If a home return is paused, the home return sequence will be executed from the beginning when the
operation is resumed.
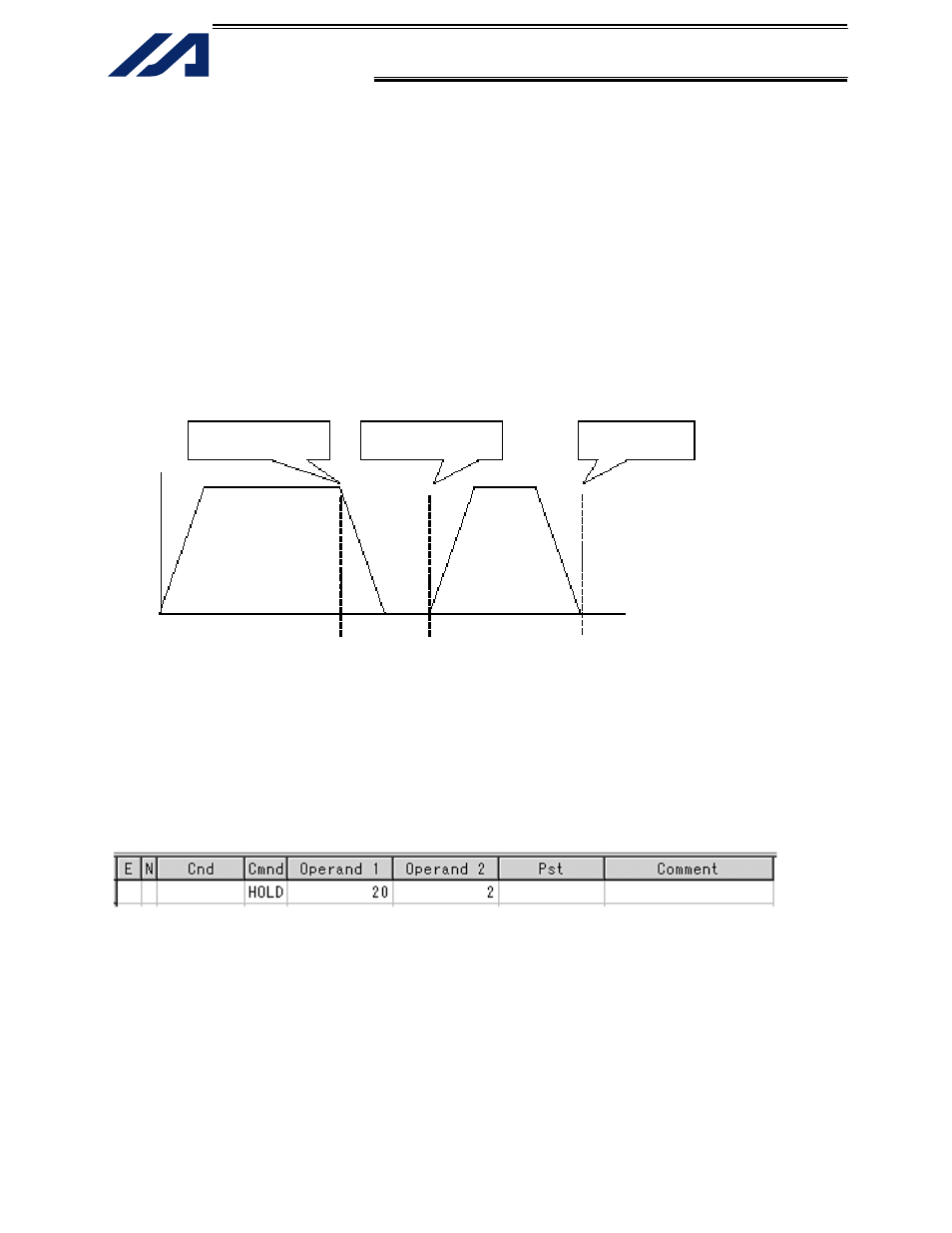
Speed
Input port 20 turns ON.
Input port 20 turns OFF.
Remaining
operation
Axis stops.
Time
SVOF input 20, contact B