IAI America XSEL-KET User Manual
Page 183
164
Part 4 Commands
INTELLIGENT ACTUATOR
PAPR (Set push-motion approach distance, speed)
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional Optional
PAPR
Distance
Speed CP
[Function] Set the operation to be performed when a PUSH command is executed.
Set the distance (push-motion approach distance) over which push-motion approach
operation (torque-limiting operation) will be performed in operand 1 (in mm), and set the
speed (push-motion approach speed) at which push-motion approach operation (torque-
limiting operation) will be performed in operand 2 (in mm/sec).
The push-motion approach distance specified in operand 1 may contain up to three decimal
places, while the speed specified in operand 2 cannot contain any decimal place.
[Example]
PAPR
100
30
Set the push-motion approach distance in a PUSH
command to 100 mm and the push-motion approach speed
to 30 mm/sec.
MOVP
2
Move to position No. 2.
PUSH
10
Perform push-motion operation from position Nos. 2 to 10.
(Note)
When the OVRD command is used, the push-motion approach speed is clamped at the
lower-limit speed of 1 mm/sec. (Reliable push-motion operation cannot be guaranteed at the
lower-limit speed. Whether or not push-motion operation can be performed reliably must be
confirmed on an actual machine by considering the effects of mechanical characteristics, etc.,
at low-speed push-motion approach.)
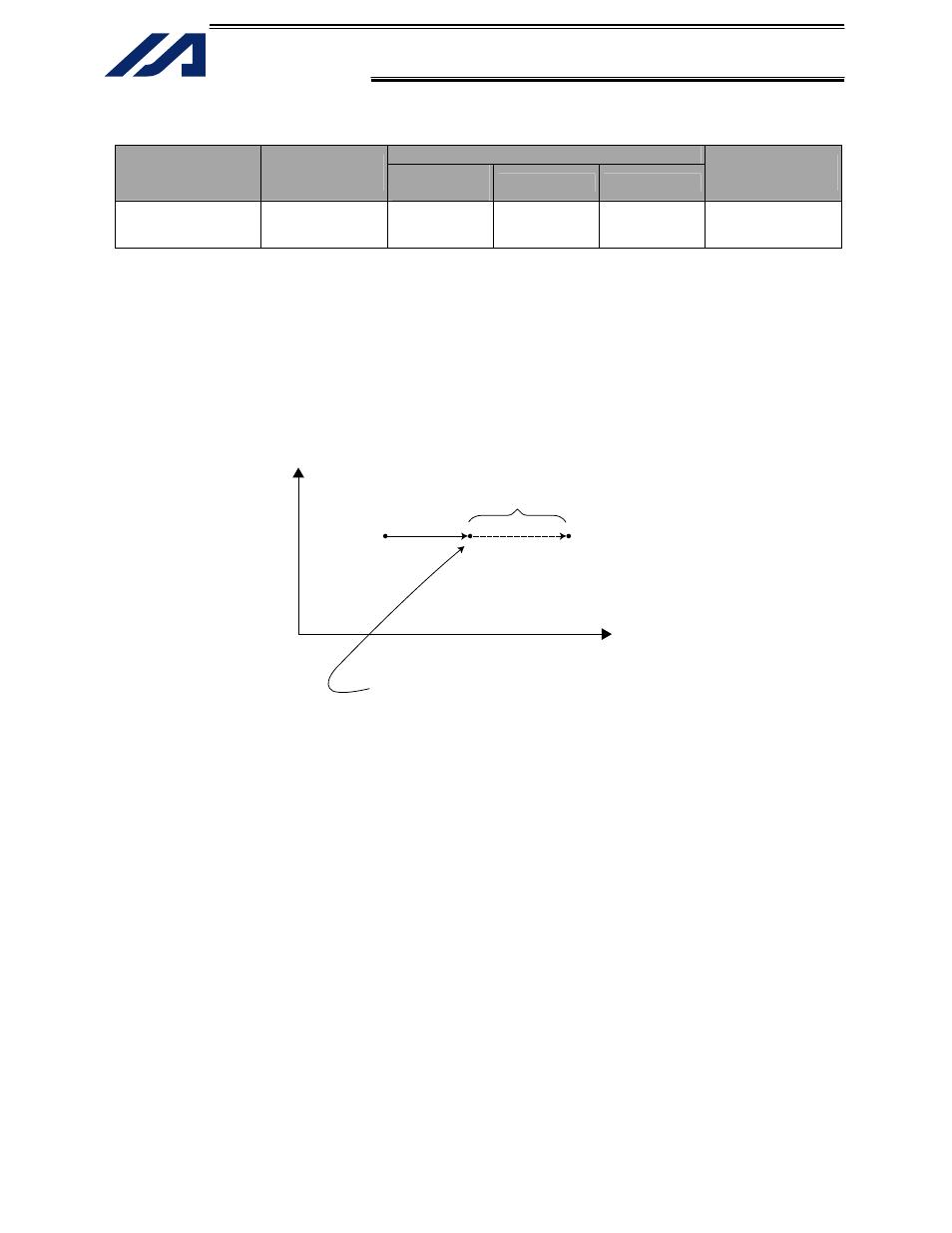
Y-axis
Position origin
Push-motion approach distance
Target position
X-axis
Start position of push-motion approach operation
(torque-limiting operation)