Abort 1 (canc) – IAI America XSEL-KET User Manual
Page 326
307
Appendix
INTELLIGENT ACTUATOR
16. Abort 1 (CANC)
[Description]
Use the declaration command CANC to cause the moving axis to decelerate to a stop and cancel the
remaining operation.
[How to use]
While the CANC signal is input, all movement commands in the program are aborted.
[Use example]
CANC command
CANC
20
Abort movement commands when input port 20 turns ON. (Declaration)
:
MOVP 1
MOVP 2
:
MOVP 21
:
* Declare this command in a step before the target movement command.
* While the CANC signal is input, all operation commands are cancelled one by one, while non-operation
commands (relating to I/O processing, calculation, etc.) are executed one by one.
[Note]
Since it becomes impossible to identify which program step is currently executed, it is recommended that
an input waiting step be created using a WTON command.
[Application]
With the CANC command, you can select the input signal pattern using operand 2.
0 = Contact a (The axis decelerates to a stop) = Same as when operand 2 is not specified.
1 = Contact b (The axis decelerates to a stop)
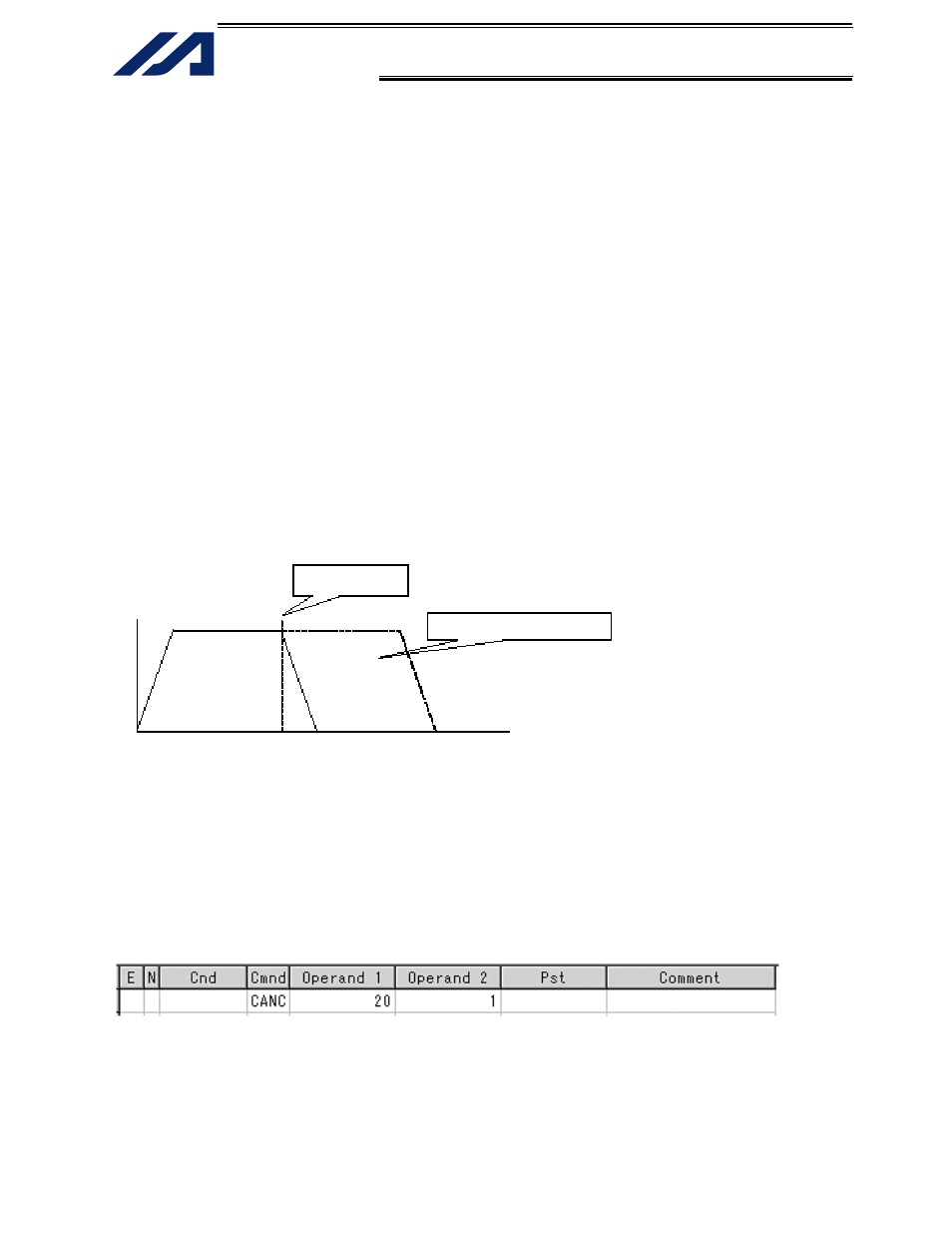
Speed
Input port 20 turns ON.
Remaining
operation
Time
This operation is cancelled.
Cancellation input 20, contact B