Pcon-ca/cfa, Power con, 66] software limit margin (parameter no.88) – IAI America PCON-CA User Manual
Page 196: 67] fieldbus i/o format (parameter no.90)
Chapter 7 I/O Parameter
POWER CON
PCON-CA/CFA
188
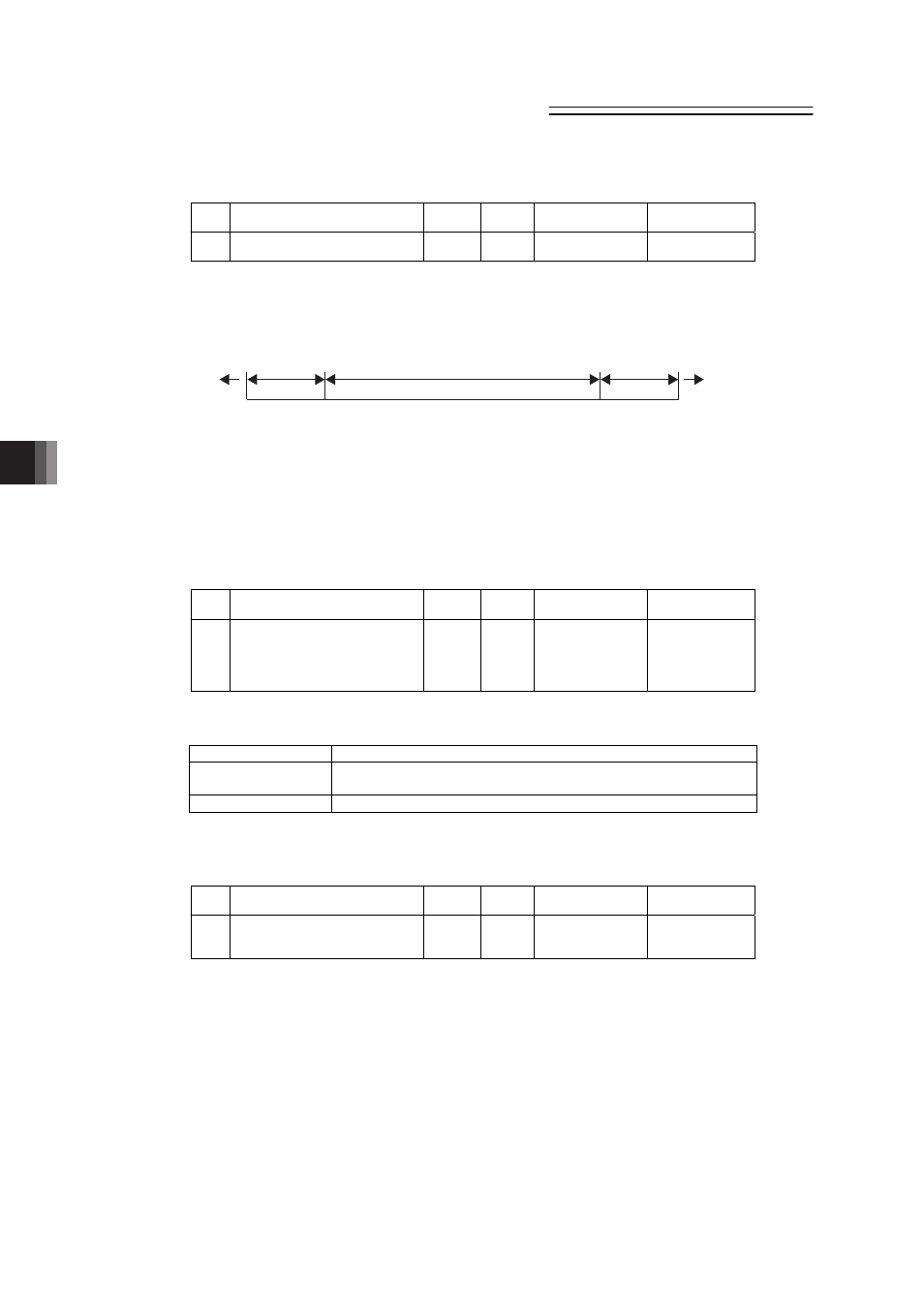
[66] Software limit margin (Parameter No.88)
No.
Name
Symbol
Unit
Input Range
Default factory
setting
88 Software limit margin
SLMA
mm
(deg)
0 to 9999.99
In accordance
with actuator
This is the parameter to set the position of over error detection against the software limit errors
set in Parameters No. 3 and No. 4.
It is not necessary to change the setting in normal use.
[67] Fieldbus I/O format (Parameter No.90)
This parameter is exclusively used for the controller of field network specification.
[Check the applicable instruction manual number in Chapter 4 Field Network, and refer to each
instruction manual.]
[68] Current limit value at stopping due to miss-pressing (Parameter No.91)
No.
Name
Symbol
Unit
Input Range
Default factory
setting
91 Current limit value at stopping
due to miss-pressing
FSTP
–
0: Current limiting
value at stop
1: Current limit
value during
pressing
0
This parameter defines the restricted current value at stopping due to miss-pressing.
This restricted current value locks the servo till the next moving command.
Parameter No.91
Description
0
Current limitation value while in operation stop (setting value in the
current limiting value at positioning stop (Parameter No.12))
1
Press-motion current-limiting value
[69] Stop method at servo OFF (Parameter No.110)
No.
Name
Symbol
Unit
Input Range
Default factory
setting
110 Stop method at servo OFF
PSOF
–
0: Rapid stop
1: Deceleration to
stop
0
Select the stop mode for when the servo is turned OFF while in operation. It is stopped with the
rated deceleration speed if 1 is selected. If 1 is selected, the actuator decelerates with position
data in execution and stops.
Software
limit margin
Software
limit margin
Error
detection area
Error
detection area
Soft limit (Parameter No.3, No.4) setting area