Pcon-ca/cfa, Power con – IAI America PCON-CA User Manual
Page 146
Chapter 3 Operation
POWER CON
PCON-CA/CFA
138
[8] Alarm, Alarm Reset (*ALM, RES)
Input
Output
PIO signal
RES
*ALM
1) Alarm signal *ALM is set to ON in the normal status but turned OFF at the occurrence of an
alarm at a level equal to or higher than the operation release level.
2) Turning reset signal RES ON under occurrence of an alarm at the operation release level
allows the alarm
(Note 1)
to be released. The action is taken at the rising edge (ON edge).
3) The alarm reset should be done after the cause of the alarm is confirmed and removed. If
alarm reset and restart are repeated many times without removal of the cause, a severe
failure such as motor burnout may occur.
Note 1 Check the 8.4 Alarm List for details of alarms.
Caution: An alarm of the cold start level cannot be cancelled by RES. Confirm the
cause, remove it, and then reboot the unit.
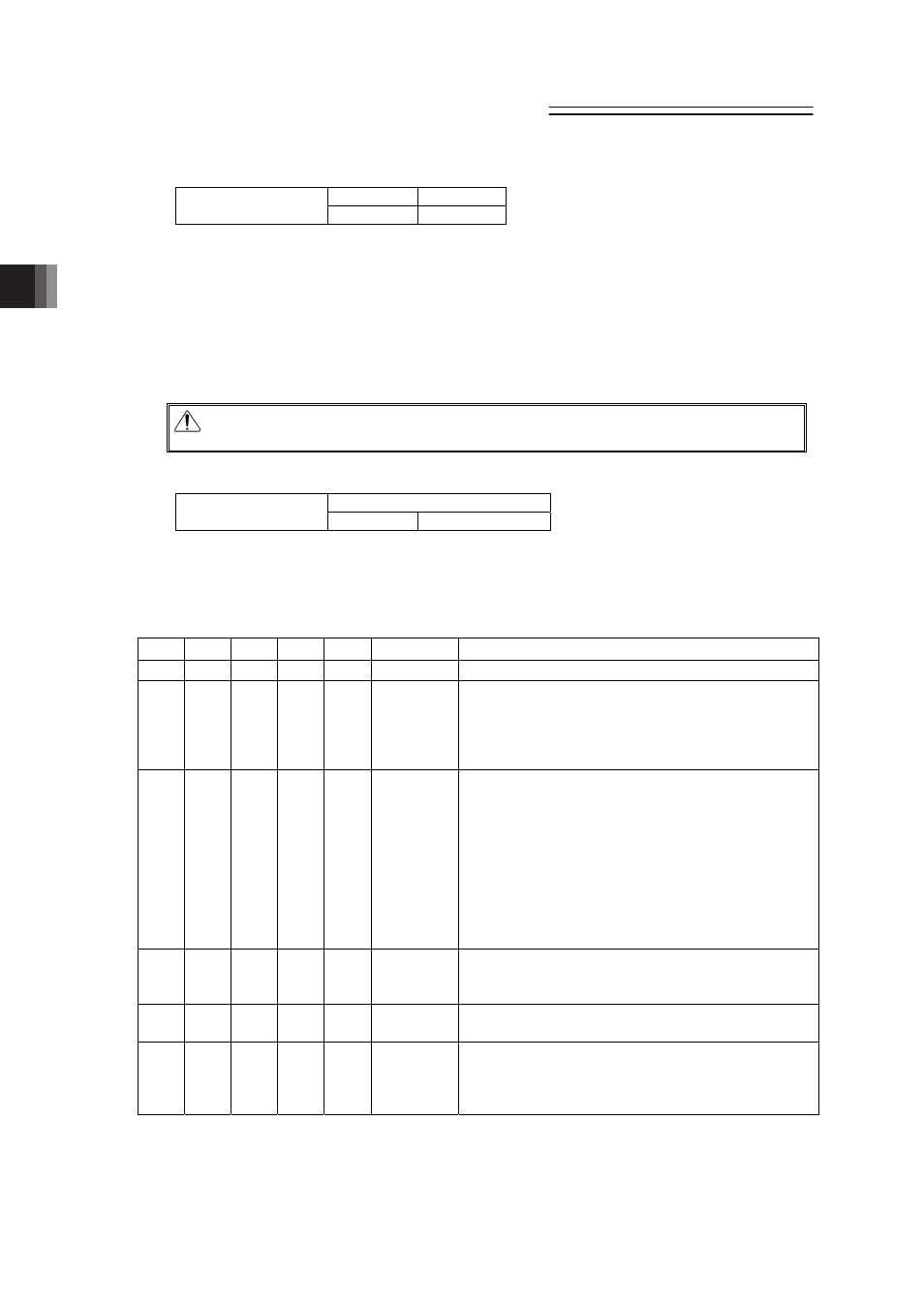
[9] Binary Output of Alarm Data Output (*ALM, ALM1 to 8)
Output
PIO signal
*ALM
ALM1 to ALM8
1) If an alarm at a level equal to or higher than the operation release level occurs, alarm
output signals ALM 1 to 8 output the alarm information in the binary code format.
2) The PLC can read the binary code of alarm signal *ALM as the strobe signal to check the
alarm information.
{
: ON z: OFF
*ALM ALM8 ALM4 ALM2 ALM1 Binary Code
Description: Alarm code is shown in ( ).
{
z
z
z
z
–
Normal
z
z
z
{
z
2
Software reset during servo ON (090)
Position No. error in teaching (091)
PWRT signal detection during movement (092)
PWRT signal detection in incomplete home return
(093)
z
z
z
{
{
3
Move command during servo OFF (080)
Position command in incomplete home return (082)
Absolute position move command when home
return is not yet completed (083)
Movement Command during Home Return
Operation (084)
Position No. error during movement (085)
Move command while pulse train input is effective
(086)
Command Deceleration Error (0A7)
z
z
{
z
z
4
FAN error detection (0D6)
Field bus module not detected (0F3)
Mismatched PCB (0F4)
z
z
{
z
{
5
Field bus link error (0F1)
Field bus module error (0F2)
z
z
{
{
z
6
Parameter data error (0A1)
Position data error (0A2)
Position command information data error (0A3)
Unsupported motor/encoder type (0A8)
(Note) *ALM Signal is an active low signal. It is ON when the power is applied to the controller, and
turns OFF when the signal is output.