Pcon-ca/cfa, Power con, Chapter 3 operation – IAI America PCON-CA User Manual
Page 114
Chapter 3 Operation
POWER CON
PCON-CA/CFA
106
3.2.5 Direct Position Specification (Solenoid Valve Mode 1) = Operation of PIO
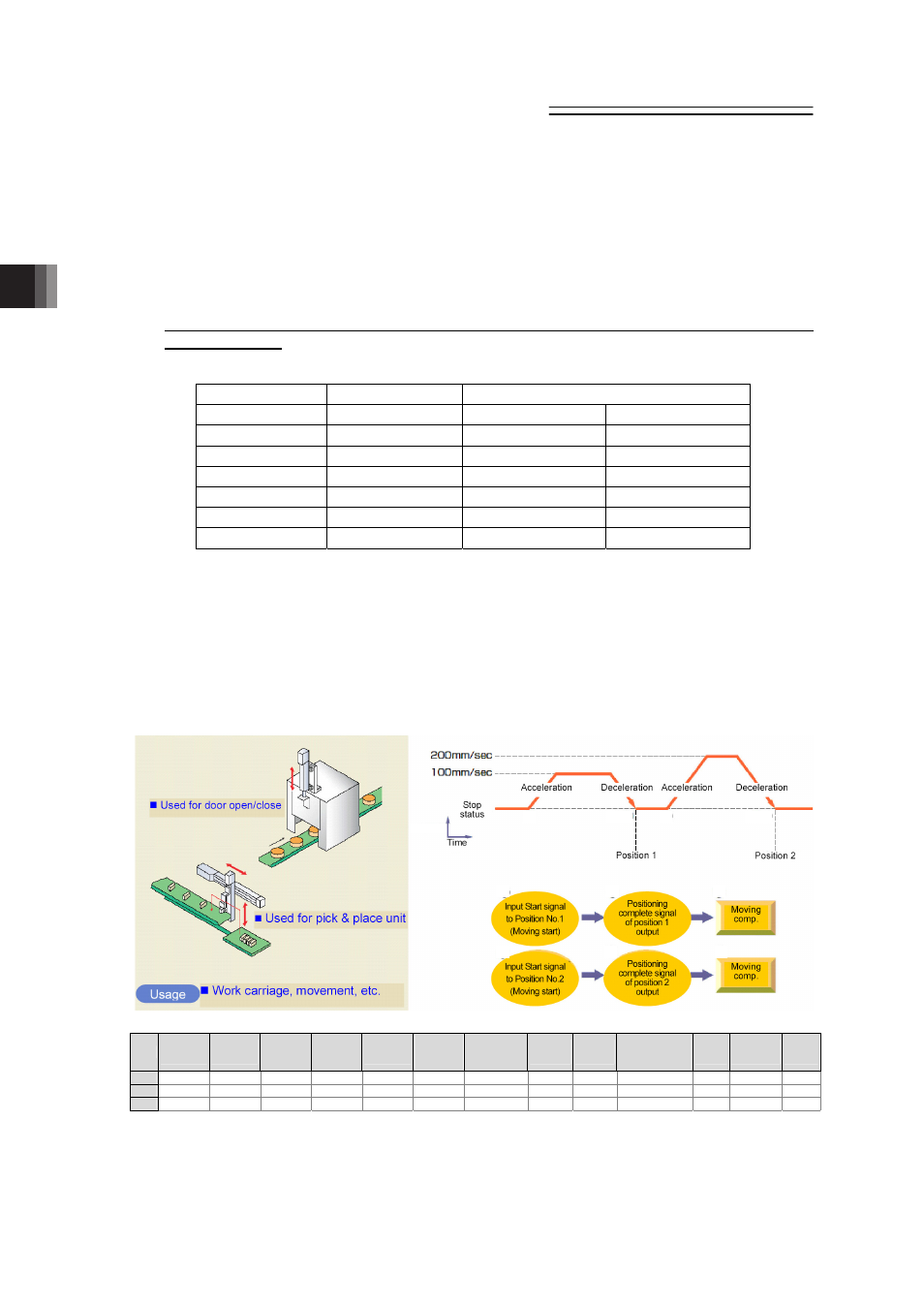
Pattern 4
The start signal is provided for every position number. Only turning ON the relevant input signal
according to the table shown below allows the operation based on the data in the target
position number to be performed. The operation mode is called the solenoid valve mode
because solenoid valves can directly drive air cylinders.
At the completion of positioning, every completed position number is output as well as the
positioning complete signal.
Positioning, pressing, and pitch feed are possible. Their control methods are the same as those
of other patterns.
[1] Positioning [Basic] (ST1 to ST6, PE1 to PE6, PEND)
Position No.
Input
Output
0
ST0
PE0
PEND
1
ST1
PE1
PEND
2
ST2
PE2
PEND
3
ST3
PE3
PEND
4
ST4
PE4
PEND
5
ST5
PE5
PEND
6
ST6
PE6
PEND
[Caution] x Speed change is not allowed during movement.
x
For incremental type, if start signal ST* is issued without home return, the home
return operation is automatically done before the operation based on the data of
the specified position number. When this specification is not desired, interlock by
home return complete signal HEND is required. Operation to the specified
position number would not take place under the condition that the home position
data is lost in the simple absolute type, but only the home-return operation will be
conducted.
Sample use
No.
Position
[mm]
Velocity
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Transported
load
Stop
mode
0
0.00
100.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
1
70.00
100.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
2
150.00
200.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
Velocity
1)
2)
3)
4)
5)
6)
1)
2) 3)
4)
5) 6)