3 error setting, 8 interrupts, 1 interrupt organization – Rainbow Electronics ATmega64C1 User Manual
Page 182
182
7647A–AVR–02/08
ATmega32/64/M1/C1
– end-of-frame
– error delimiter
– overload delimiter
• AERR: Acknowledgment error (Tx only). No detection of the dominant bit in the acknowledge
slot.
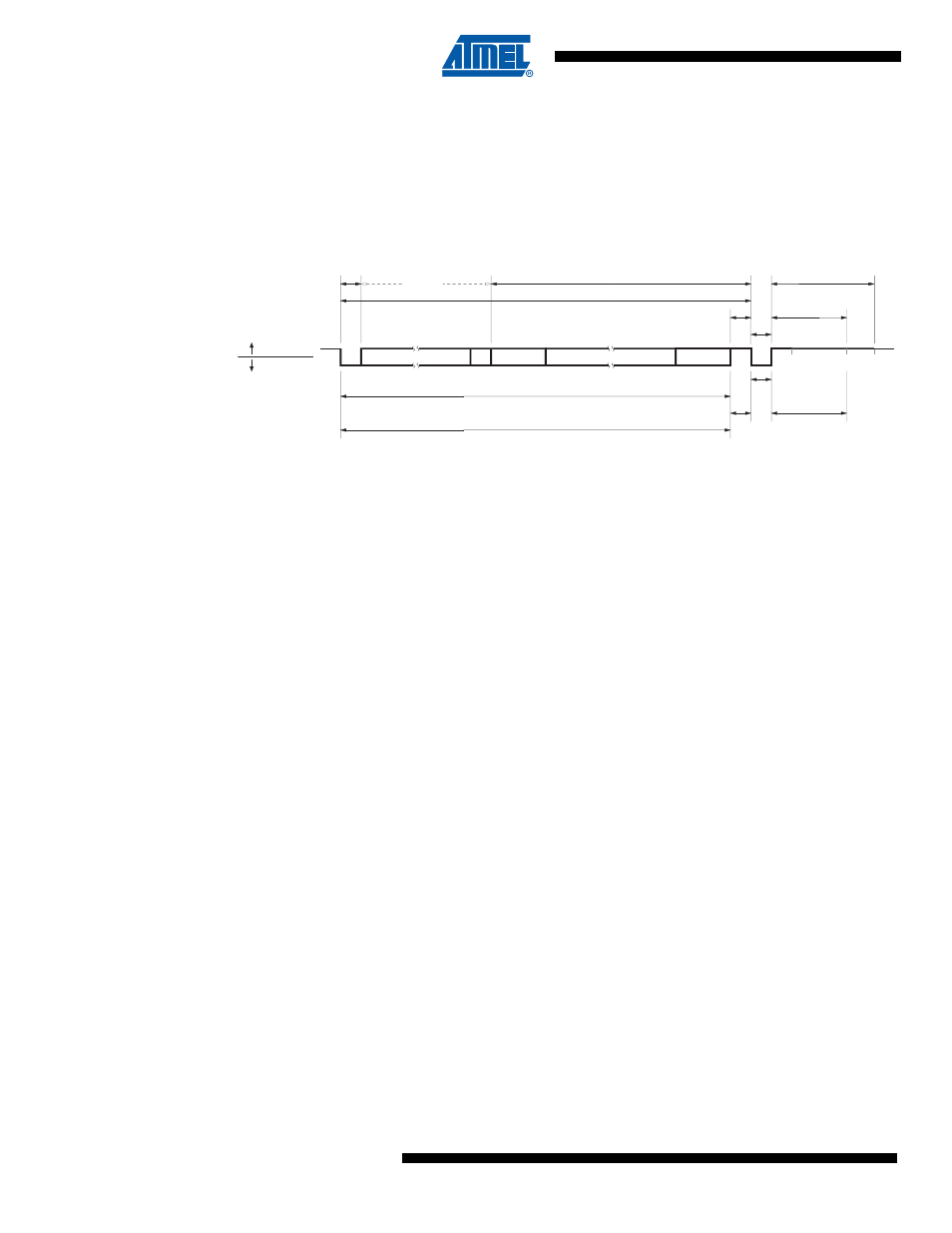
Figure 16-13. Error Detection Procedures in a Data Frame
16.7.3
Error Setting
The CAN channel can detect some errors on the CAN network.
• In transmission:
The error is set at MOb level.
• In reception:
- The identified has matched:
The error is set at MOb level.
- The identified has not or not yet matched:
The error is set at general level.
After detecting an error, the CAN channel sends an error frame on network. If the CAN channel
detects an error frame on network, it sends its own error frame.
16.8
Interrupts
16.8.1
Interrupt organization
The different interrupts are:
• Interrupt on receive completed OK,
• Interrupt on transmit completed OK,
• Interrupt on error (bit error, stuff error, CRC error, form error, acknowledge error),
• Interrupt on frame buffer full,
• Interrupt on “Bus Off” setting,
• Interrupt on overrun of CAN timer.
The general interrupt enable is provided by ENIT bit and the specific interrupt enable for CAN
timer overrun is provided by ENORVT bit.
Identifier
Message Data
RTR
ACK error
Form error
Stuff error
Bit error
CRC error
Form error
Stuff error
Bit error
ACK
EOF
SOF
CRC
del.
ACK
del.
inter.
Control
CRC
Tx
Rx
Arbitration