7 error management, 1 fault confinement, 2 error types – Rainbow Electronics ATmega64C1 User Manual
Page 181
181
7647A–AVR–02/08
ATmega32/64/M1/C1
16.7
Error Management
16.7.1
Fault Confinement
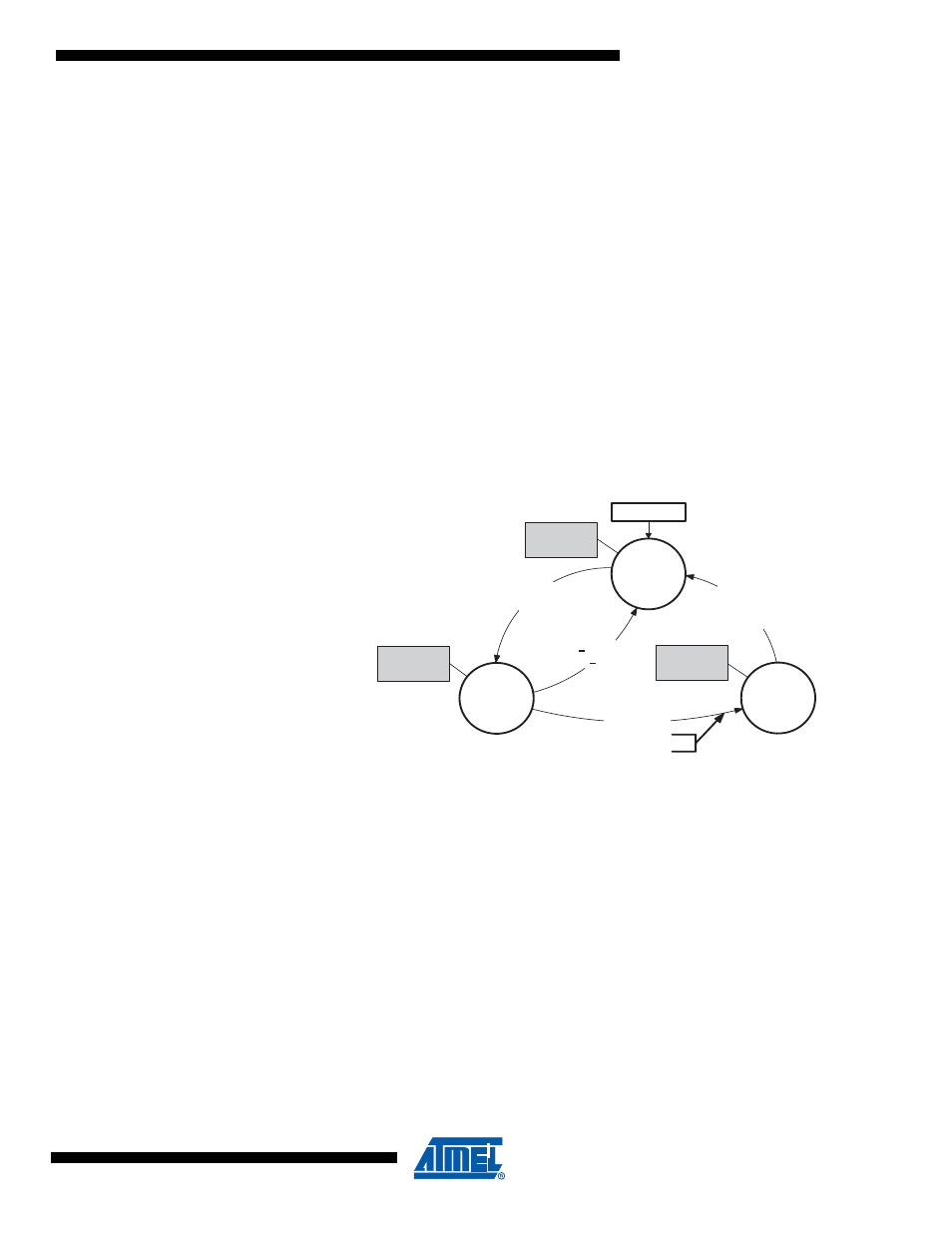
The CAN channel may be in one of the three following states:
• Error active (default):
The CAN channel takes part in bus communication and can send an active error frame when
the CAN macro detects an error.
• Error passive:
The CAN channel cannot send an active error frame. It takes part in bus communication, but
when an error is detected, a passive error frame is sent. Also, after a transmission, an error
passive unit will wait before initiating further transmission.
• Bus off:
The CAN channel is not allowed to have any influence on the bus.
For fault confinement, a transmit error counter (TEC) and a receive error counter (REC) are
implemented. BOFF and ERRP bits give the information of the state of the CAN channel. Setting
BOFF to one may generate an interrupt.
Figure 16-12. Line Error Mode
Note:
More than one REC/TEC change may apply during a given message transfer.
16.7.2
Error Types
• BERR: Bit error. The bit value which is monitored is different from the bit value sent.
Note:
Exceptions:
- Recessive bit sent monitored as dominant bit during the arbitration field and the acknowl-
edge slot.
- Detecting a dominant bit during the sending of an error frame.
• SERR: Stuff error. Detection of more than five consecutive bit with the same polarity.
• CERR: CRC error (Rx only). The receiver performs a CRC check on every destuffed received
message from the start of frame up to the data field. If this checking does not match with the
destuffed CRC field, an CRC error is set.
• FERR: Form error. The form error results from one (or more) violations of the fixed form of
the following bit fields:
– CRC delimiter
– acknowledgement delimiter
ERRP = 1
BOFF = 0
Error
Active
Error
Passive
Bus
Off
TEC > 127 or
REC > 127
128 occurrences
of 11 consecutive
recessive bit
Reset
interrupt - BOFFIT
TEC > 255
TEC < 127 and
REC < 127
ERRP = 0
BOFF = 0
ERRP = 0
BOFF = 1