IAI America PCON-CF User Manual
Page 90
72
6. Data Entry
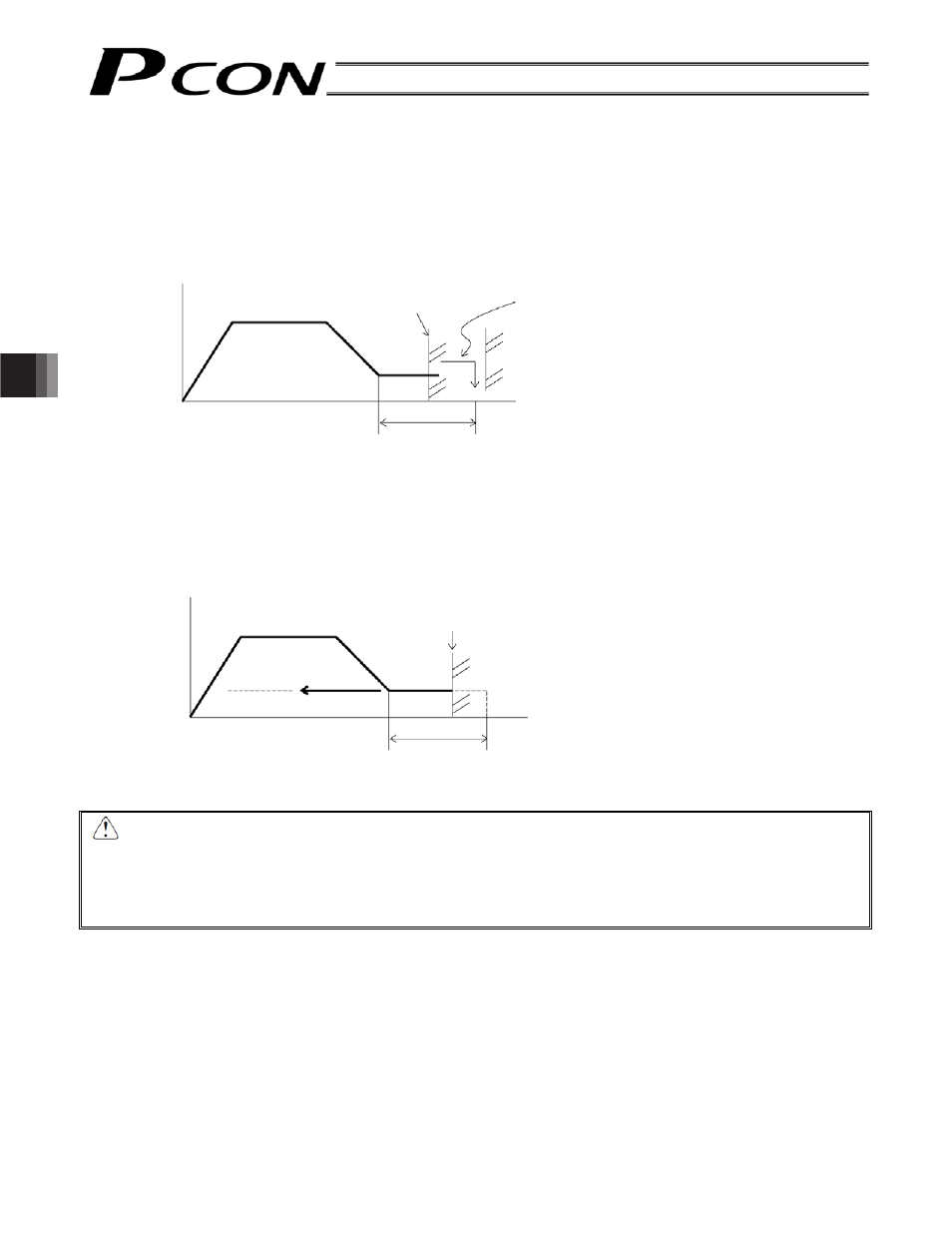
(3) Work part moves during push & hold operation
[1] Work part moves in the pushed direction
If the work part moves in the pushed direction after completion of push action, the actuator will chase the
work part within the positioning band.
If the current drops to below the current-limiting value set in the “Push” field of the position table while the
actuator is moving, the position complete signal will turn OFF. The position complete signal will turn ON
when the current-limiting value increases to the specified level again.
[2] Work part moves in the opposite direction
(Actuator is pushed back by the strong reactive force of the work part)
If the actuator is pushed back after completion of push action because the reactive force of the work part is
greater than the thrust force of the actuator, the actuator will be pushed back until its push force balances
out with the reactive force of the work part.
The position complete signal will remain ON.
(Note)
If the actuator is pushed back to the target position, an alarm will generate.
Caution: As the maximum push distance is approached during push-motion operation, the actuator
decelerates by assuming that it has missed the work part and stops at the position corresponding
to the maximum push distance. If the speed drops significantly immediately before the actuator
stops, the set push force cannot be maintained. For this reason, do not perform any push-motion
operation where the entire range of the maximum push distance is used.
Speed
Moving distance
Target position
Completion of push action
is recognized here.
If the load moves in the pushed
direction, the actuator will chase
it within the positioning band.
Positioning band
(maximum push distance)
Speed
Moving distance
Target position
Completion of push action
is recognized here.
Positioning band
(maximum push distance)