IAI America PCON-CF User Manual
Page 185
167
10. T
roubleshooting
z A servo error occurred while the actuator was moving (ROBO Gripper).
Cause: The work part was not positioned properly and contacted the finger attachment in the positioning
mode.
Action: Adjust the starting position of push action and the thickness of finger attachment (including buffer
material) by considering a possible offset of work part position, so that the work part can be
clamped properly in the push & hold mode.
Immediately after recovery from the error, the feed mechanism may still be locked. Be sure to turn
the open/close screw to loosen each finger attachment before resetting the alarm.
Caution: If the servo ON signal is disabled or the alarm is reset while the servo ON signal is still
ON, the servo will remain ON.
If the open/close screw is turned in this condition, the screw will return automatically and
the lock cannot be released. Therefore, reissuing a movement command will cause the
alarm to generate again.
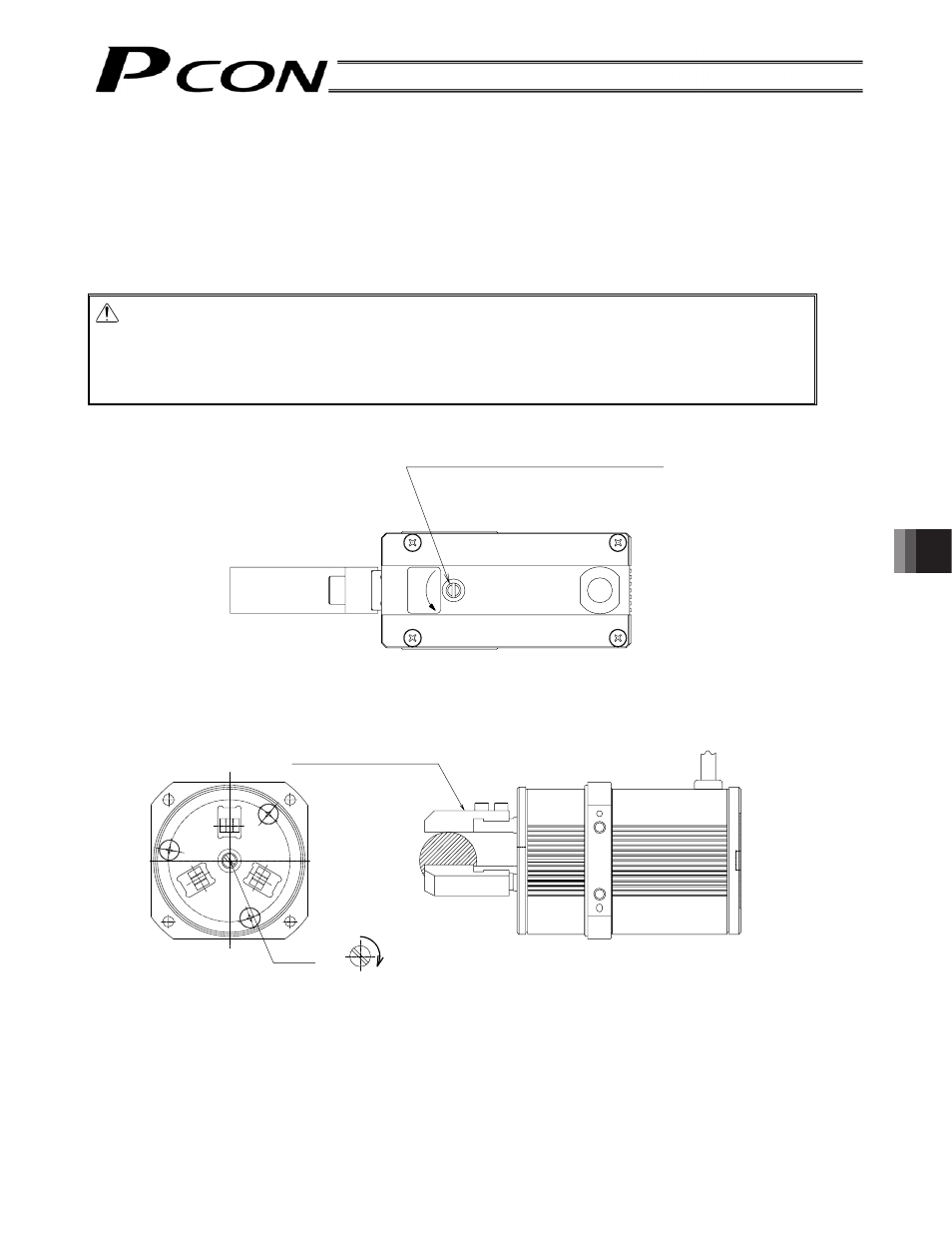
[2-finger type]
[3-finger type]
Remove one finger attachment and take out the work part first, and then turn the open/close screw clockwise.
Open/close screw
Turn the screw counterclockwise
using a flathead screwdriver.
OPEN
Open/close
screw
Remove one finger attachment.
Turn the screw
clockwise.
Opening direction