IAI America PCON-CF User Manual
Page 155
137
8. Parameter Settings
z Enable function (No.42 FDIO4)
Whether to enable or disable the deadman switch function on an ANSI-type teaching pendant is defined by
parameter No. 42.
* An ANSI-type teaching pendant will be developed in the future.
Setting
Enable (Use)
0
Disable (Do not use)
1
The factory setting is “1 [Disable].”
z Polarity of home check sensor input (No.43 AIOF)
The home check sensor is not included in the standard specification, but it can be installed as an option.
Normally this parameter need not be changed, but if the customer wishes to change the mode after the shipment,
change the value of Parameter No. 43.
Definition of settings: 0 (Standard specification without home check sensor)
1 (Use the home check sensor based on contact-a sensor polarity)
2 (Use the home check sensor based on contact-b sensor polarity)
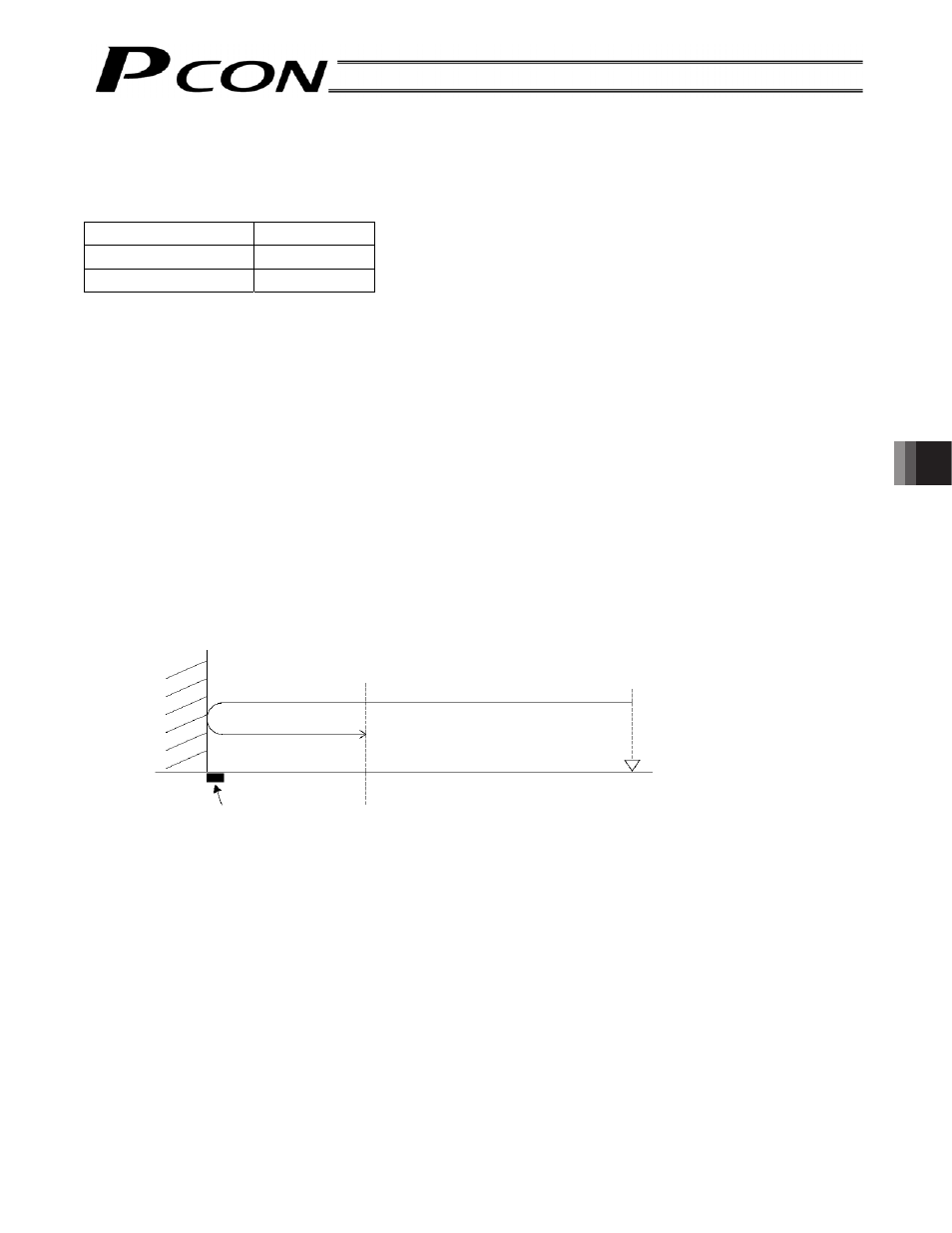
[Explanation of operation]
[1] When a home return command is issued, the actuator moves until contacting the mechanical end. Upon
contact with the mechanical end, the home check sensor signal is detected.
[2] Next, the actuator reverses its direction and stops at the home position.
[3] The controller determines that the movement has completed successfully if the home check sensor signal
had changed when the actuator stopped. If the sensor signal remains the same, the controller recognizes
that “position deviation” has occurred, in which case the controller will generate a “Home sensor not
detected” error and output an alarm signal.
z Load output judgment time (No.50 LDWT)
If the torque check function is used in push & hold operation, the load output (LOAD signal) will turn ON when a
specified condition is met. Since the command torque does not remain constant but fluctuates within a certain
band while the actuator is moving, whether or not to turn ON the load output is determined based on whether the
total duration of periods in which the command torque has exceeded the threshold corresponds at least to a
specified time. This specified time is set using this parameter. The default value is “255 msec.”
Mechanical end
Home position
Home check sensor
Power on position