IAI America PCON-CF User Manual
Page 89
71
6. Data Entry
“Completion of push action” is determined based on a combination of the current-limiting value set in the
“Push” field of the position table and the push completion judgment time set by parameter No. 6.
Set an appropriate condition by considering the material and shape of the work part, among others.
For details, refer to Chapter 8, “Parameter Settings.”
Warning
x If the actuator contacts the work part before reaching the target position, a servo error
alarm will generate. Pay due attention to the relationship of the target position and the
work part position.
x The actuator continues to push the work part at the push force at standstill determined
by the current-limiting value. Since the actuator is not inactive, exercise due caution
when handling the machine in this condition.
(2) Work part was not contacted (missed)
If the actuator does not still contact the work part after having moved the distance specified in the “Positioning
band” field, the position complete signal will not turn ON.
Therefore, include timeout check processing in the sequence circuit on the PLC side.
x It is recommended that a zone signal be also used as a “simple ruler” to supplement the judgment of missed
work part.
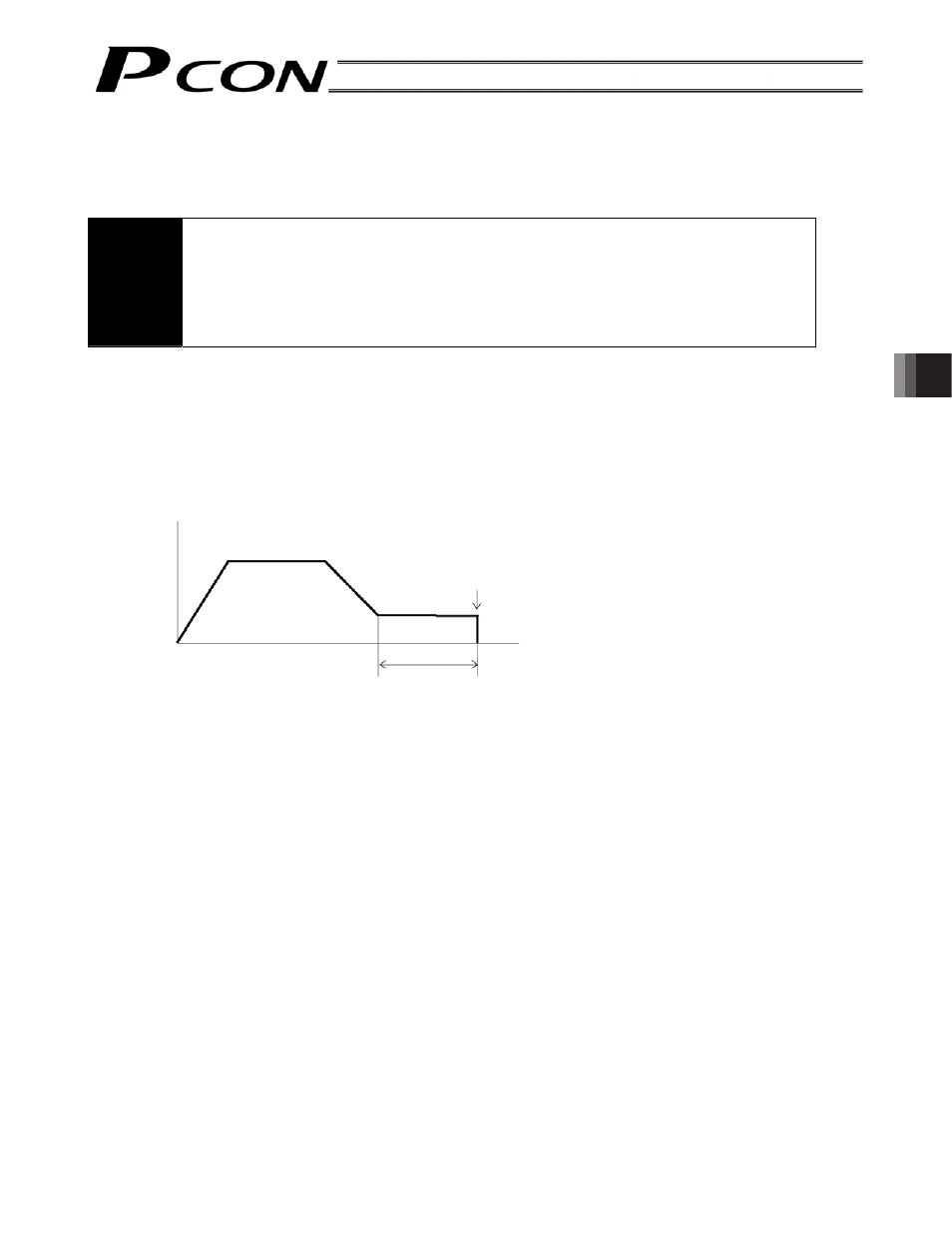
Speed
Moving distance
Target position
Positioning band
(maximum push distance)
The position complete signal will not turn
ON if the load has not been contacted.