4 alarm description and cause/action – IAI America PCON-CF User Manual
Page 173
155
10. T
roubleshooting
10.4 Alarm Description and Cause/Action
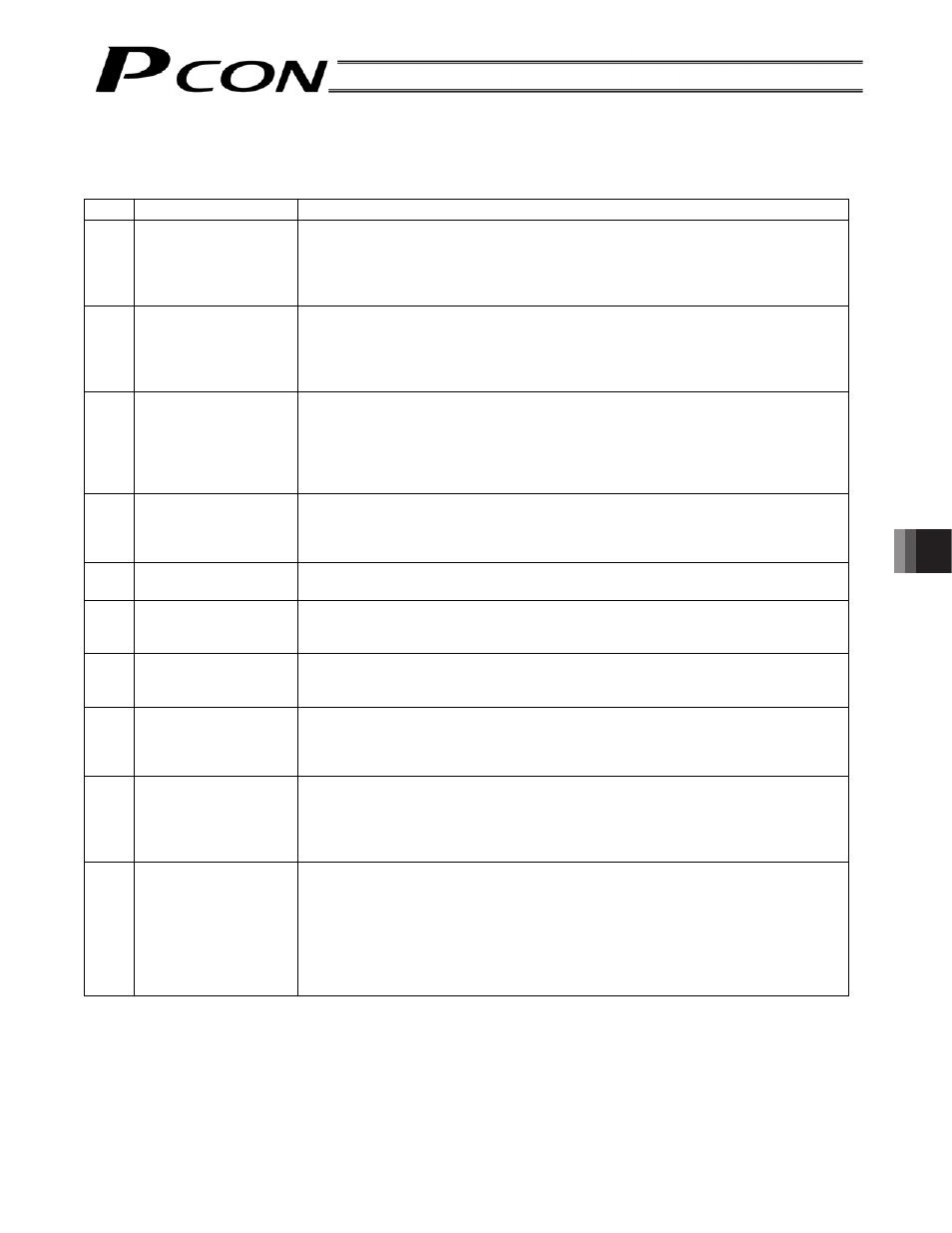
(1) Message level alarms
Code Error
name
Cause/Action
080 Movement
command
when servo OFF
Cause:
A movement command was input as a numerical command when the servo
was OFF.
Action:
Input a SON signal to turn the servo ON (the SV signal or PEND signal
should turn ON).
If this error occurred when parameter No. 21 was set to “Disable,” contact IAI.
082 Position
movement
command before home
return completion
Cause:
A position movement command was input when home return was not yet
completed.
Action:
Input a HOME signal to perform home return, confirm that the home return
has completed (the HEND signal should be ON), and then input the position
movement command.
083 Absolute
position
movement command
before home return
completion
Cause:
An absolute position movement command was input when home return was
not yet completed. (This action will not generate an error in the position
number specification mode.)
Action:
Input a HOME signal to perform home return, confirm that the home return
has completed (the HEND signal should be ON), and then input the position
movement command.
084 Movement
command
during home return
Cause:
A movement command was input as a numerical command when home
return was in progress.
Action:
Input the movement command after confirming that the home return has
completed (the HEND signal should be ON).
085
Position number error
during movement
Cause:
No value is entered under the specified position number.
Action:
Enter valid data in the position table.
090 Software
reset
command when servo
ON
Cause:
A software reset command was input when the servo was ON.
Action:
Perform the software reset when the servo is OFF (the SV signal is OFF).
091
Position number error
during teaching
Cause:
The specified position number is not inside the specifiable range when writing
the current position in the teaching mode.
Action:
Specify a position number inside the specifiable range.
092
PWRT signal detected
during movement
Cause:
The current-position write signal (PWRT) was input in the teaching mode
while the actuator was jogging.
Action:
Input the PWRT signal after confirming that the jog button is not pressed and
the actuator is stopped (MOVE output signal is OFF).
093
PWRT signal detected
before completion of
home return
Cause:
The current-position write signal (PWRT) was input in the teaching mode
when home return was not yet completed.
Action:
Input the HOME signal first to perform home return, and then input the PWRT
signal after confirming that home return has completed (HEND output signal
is ON).
0A2
Position data error
Cause:
[1] A move command was input when no target position was set in the
“Position” field.
[2] The target position in the “Position” field exceeds a soft limit setting.
[3] An incremental target position was specified in the “Position” field in the 3-
point type.
Action:
[1] Set a target position first.
[2] Change the target position to a value inside the soft limit setting.
[3] Specify an absolute target position.