9 ethernet/ip related parameters – IAI America PCON-CFA User Manual
Page 262
4. SCON-CA
254
4.9
EtherNet/IP Related Parameters
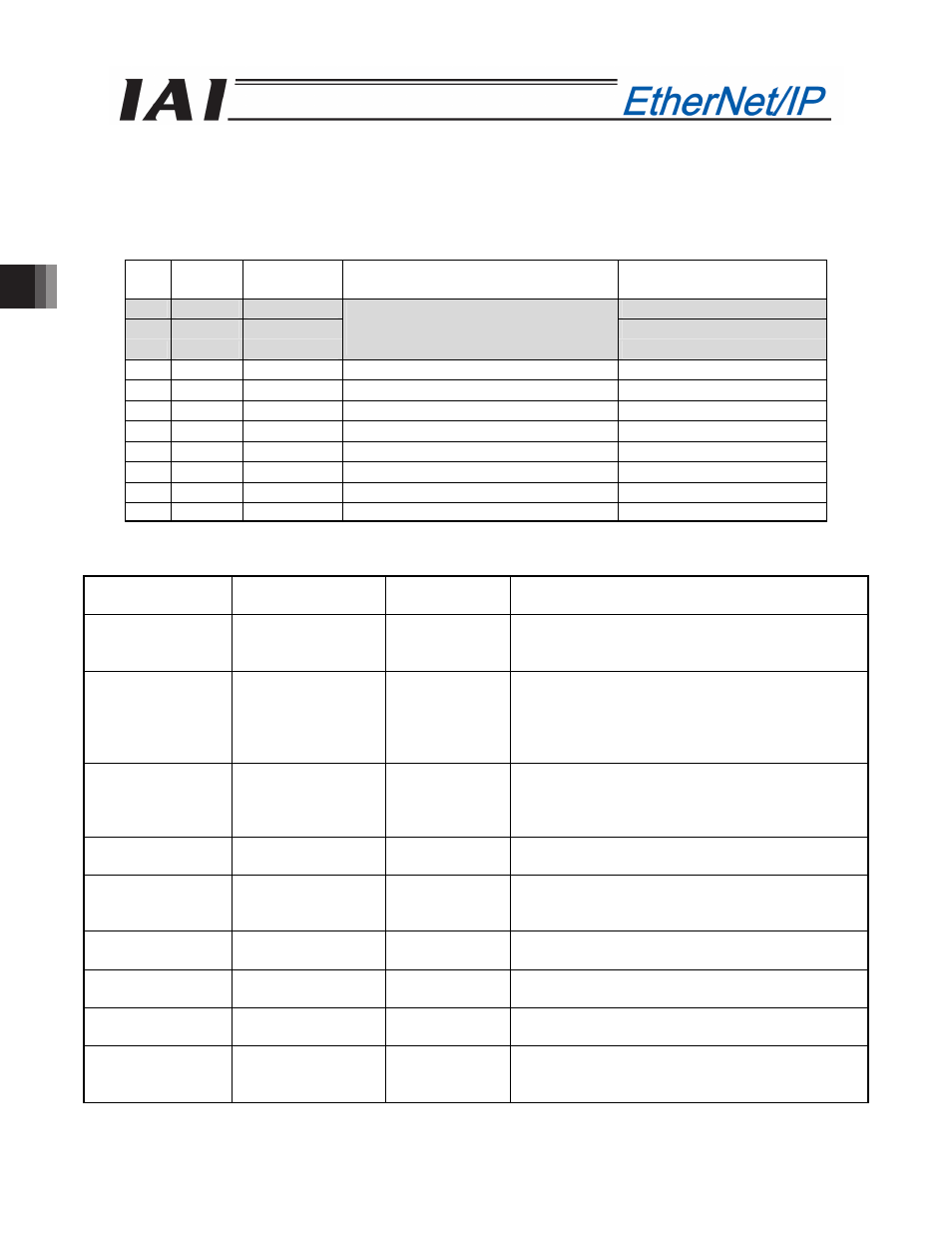
Parameters relating to EtherNet/IP are No. 84 to No. 87, No. 90, No. 140 to No. 142 and No.159.
.
Category: C: External interface parameter
No. Category
Symbol
Name
Default value set in the
factory before delivery
1
~
83
Refer to operation manual for the
controller for the parameters No. 1
through No. 83.
84
C
FMOD
Field bus operation mode
0
86
C
FBRS
Field bus baud rate
0
87
C
NTYP
Network type
7
90
C
FMIO
Field I/O format
3
140
C
IPAD
IP address
192.168.0.1
141
C
SNMK
Subnet mask
255.255.255.0
142
C
DFGW
Default gateway
0.0.0.0
159
C
FBVS
FB Half Direct Mode Speed Unit
0
z
Field bus operation mode (No.84 FMOD)
Specify the operation mode in parameter No. 84 using a value between 0 and 8.
Value set in
parameter No. 84
Mode
Number of
occupied bytes
Contents
0(Factory setting) Remote I/O mode
2
Operation using PIOs
(24 V I/Os) is performed via
EtherNet/IP.
1
Position/simple
direct mode
8
The target position can be set directly using the
value or the operation can be performed using
position data value.
The other values required for the operation are set
on the position data.
2
Half direct value
mode
16
In addition to the target position, the speed,
acceleration/deceleration and pressing current
value are set directly using the values to perform
the operation.
3
Full direct value
mode
32
All the values related to the position control are set
using the values to perform the operation.
4
Remote I/O mode 2
12
The current position and current speed reading
functions are added to the functions in the remote
I/O mode.
5
Position/simple
direct mode 2
8
Set this value to implement force control in the
position/simple direct numerical mode.
6
Half direct mode 2
16
Set this value to implement force control in the half
direct numerical mode.
7
Remote I/O mode 3
12
Set this value to implement force control in the
remote I/O mode.
8
Half direct mode 3
16
Set this value to switch servo gains or vibration
damping control parameters in the half direct
numerical mode.