IAI America PCON-CFA User Manual
Page 116
3. SCON-CA/CF
A
108
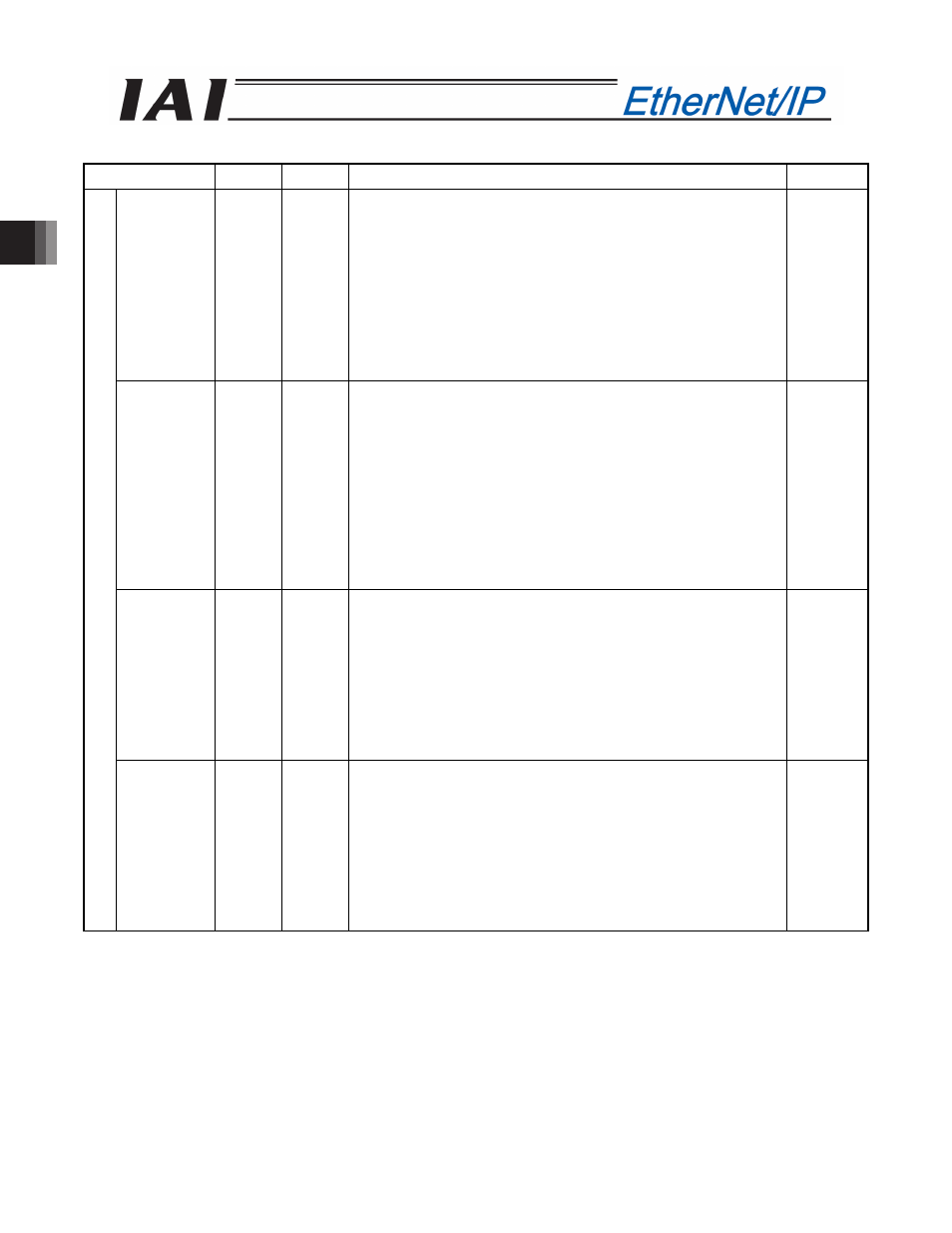
(3) I/O signal assignment (* “ON” in the table shows the corresponding bit of “1” and “OFF” shows “0”.)
Signal type
Bit
Symbol
Contents
Details
Target
position
32-bit
data
-
32-bit signed Integer.
Set the target position on the absolute coordinates.
The unit is 0.01mm and settable range is between –999999 to
+999999.
(Example) When it is “+25.41mm”, set it as “2541”.
If the value larger than the value (0.2mm) inside the soft limit
for the parameter, the movement would be limited to the
inside the soft limit (0.2mm).
* When the input is performed in hexadecimal notation, input
the negative value using a complement of 2.
3.8 (2)
Positioning
band
32-bit
data
-
32-bit integer
The unit is 0.01mm and settable range is between 1 to
+999999.
(Example) When it is “25.40mm”, set it as “2540”. This register
value has two meanings depending on the operation type.
[1] In the case of positioning operation, it shows the
allowable range from the target position, that is regarded
as the positioning completion.
[2] In the case of pressing operation, it shows the pressing
width value. Specify the normal operation or pressing
operation using the “PUSH” control signal setting.
3.8 (2)
Speed
16-bit
data
-
16-bit integer
Specify the speed at which to move the actuator.
The unit is 1.0mm/sec or 0.1mm/sec and settable range is 0
to 65535.
The change of unit is to be conducted in Parameter No.159
FB Half Direct Mode Speed Unit.
(Example) When it is “254.0mm/sec”, set it as “254”. When
the movement command is set with the value bigger than the
max. speed, an alarm is issued.
3.8 (2)
P
LC
o
ut
pu
t
Acceleration/
Deceleration
16-bit
data
-
16-bit integer
Specify the acceleration / deceleration at which to move the
actuator (the acceleration and deceleration will be the same
value).
The unit is 0.01G and settable range is 1 to 300.
(Example) To set “0.30 G”, specify “30”.
If a move command is issued by specifying “0” or any value
exceeding the maximum acceleration or deceleration, an
alarm will occur.
3.8 (2)