IAI America PCON-CFA User Manual
Page 169
4. SCON-CA
161
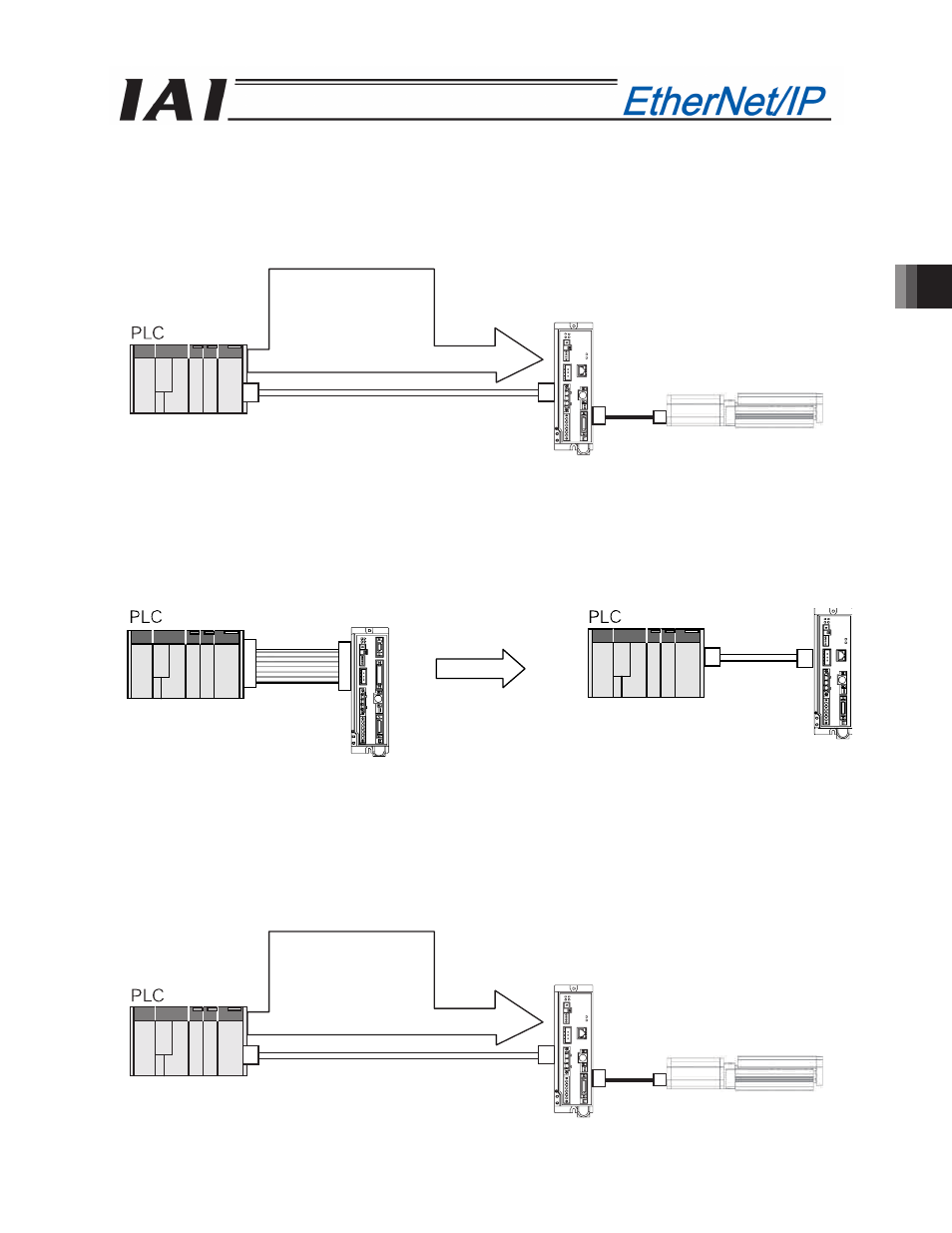
[7] Half direct mode 2: In this mode, the actuator is operated by specifying the speed,
acceleration/deceleration and pressing current, in addition to the target position,
directly as values.
Unlike in mode [3], command current cannot be read in this mode. However, load
cell data can be read instead. This mode also supports force control.
Number of occupied bytes: 16 bytes
SCON-CA supporting
EtherNet/IP
Actuator
Target position: 100.00 mm
Positioning band: 0.10 mm
Speed specification:
100.0 mm/sec
Acceleration/deceleration:
0.30 G
Pressing current: 50%
[8] Remote I/O mode 3: In this mode, the actuator is operated by EtherNet/IP instead of PIO (24 V I/O).
Current position and command current function is added to the function [1].
Number of occupied bytes: 12 bytes
[9] Half direct mode 3: In this mode, the actuator is operated by specifying the speed,
acceleration/deceleration and pressing current, in addition to the target position,
directly as values.
In this mode, the vibration damping function is supported instead of the jog function
available in mode [3].
Number of occupied bytes: 16 bytes
SCON-CA supporting
EtherNet/IP
Actuator
Target position: 100.00 mm
Positioning band: 0.10 mm
Speed specification:
100.0 mm/sec
Acceleration/deceleration:
0.30 G
Pressing current: 50%
SCON-CA not supporting
EtherNet/IP
PIO connection
SCON-CA supporting
EtherNet/IP
EtherNet/IP connection
Flat cable
Communication
cable