7 interrupts, Interrupts, Cp3 bt26 – National CP3BT26 User Manual
Page 125
125
www.national.com
CP3
BT26
19.6.4
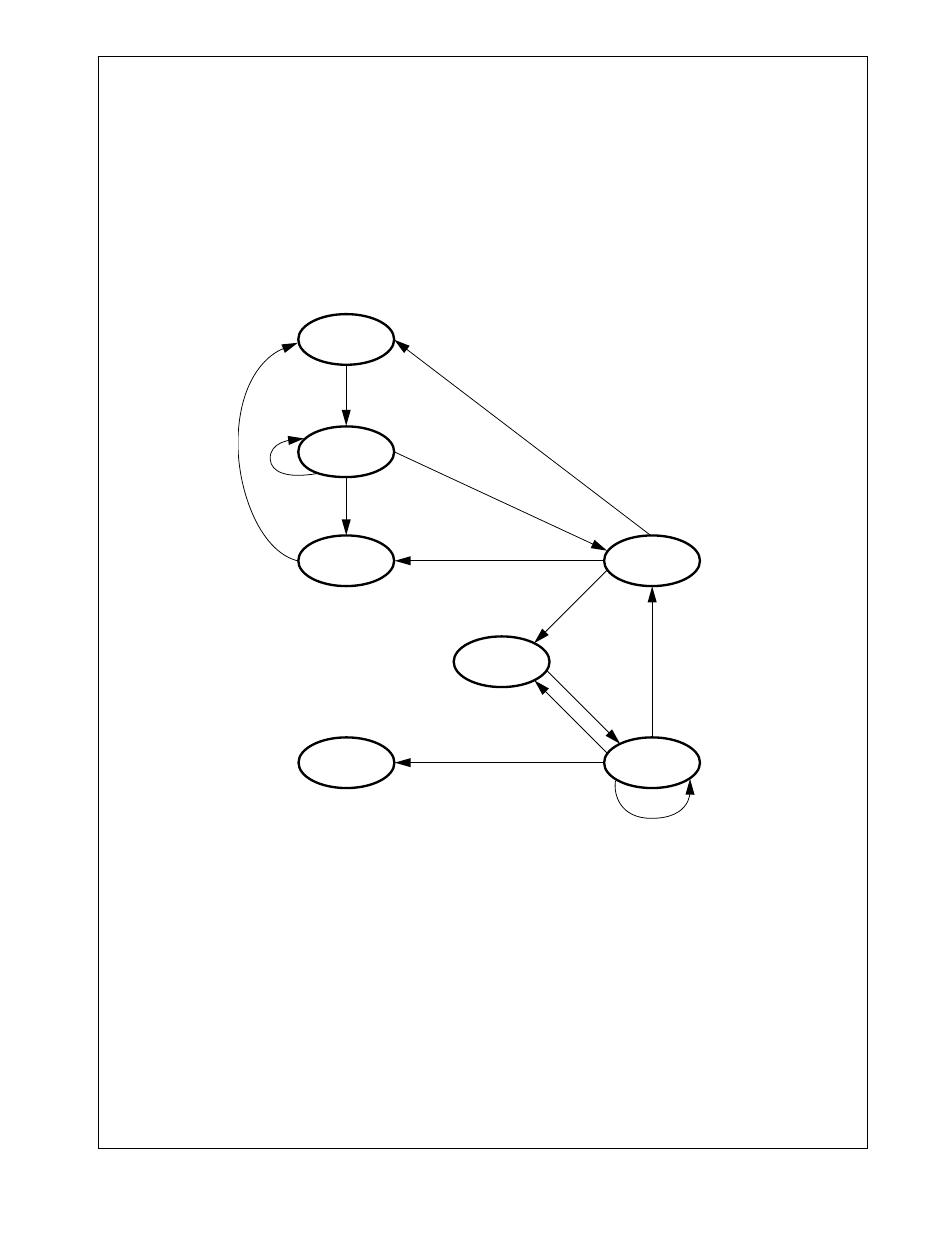
TX Buffer States
The transmission process can be started after software has
loaded the buffer registers (data, ID, DLC, PRI) and set the
buffer status from TX_NOT_ACTIVE to TX_ONCE,
TX_RTR, or TX_ONCE_RTR.
When the CPU writes TX_ONCE, the buffer will be
TX_BUSY as soon as the CAN module has scheduled this
buffer for the next transmission. After the frame could be
successfully transmitted, the buffer status will be automati-
cally reset to TX_NOT_ACTIVE when a data frame was
transmitted or to RX_READY when a remote frame was
transmitted.
If the CPU configures the message buffer to
TX_ONCE_RTR, it will transmit its data contents. During the
transmission, the buffer state is 1111b as the CPU wrote
1110b into the status section of the CNSTAT register. After
the successful transmission, the buffer enters the TX_RTR
state and waits for a remote frame. When it receives a re-
mote frame, it will go back into the TX_ONCE_RTR state,
transmit its data bytes, and return to TX_RTR. If the CPU
writes 1010b into the buffer status section, it will only enter
the TX_RTR state, but it will not send its data bytes before
it waits for a remote frame. Figure 58 illustrates the possible
transmit buffer states.
Figure 58.
Transmit Buffer States
19.7
INTERRUPTS
The CAN module has one dedicated ICU interrupt vector for
all interrupt conditions. In addition, the data frame receive
event is an input to the MIWU (see Section 13.0). The inter-
rupt process can be initiated from the following sources.
CAN data transfer
— Reception of a valid data frame in the buffer. (Buffer
state changes from RX_READY to RX_FULL or
RX_OVERRUN.)
— Successful transmission of a data frame. (Buffer state
changes from TX_ONCE to TX_NOT_ACTIVE or
RX_READY.)
— Successful response to a remote frame. (Buffer state
changes from TX_ONCE_RTR to TX_RTR.)
— Transmit scheduling. (Buffer state changes from
TX_RTR to TX_ONCE_RTR.)
CAN error conditions
— Detection of an CAN error. (The CEIPND bit in the
CIPND register will be set as well as the correspond-
ing bits in the error diagnostic register CEDIAG.)
The receive/transmit interrupt access to every message
buffer can be individually enabled/disabled in the CIEN reg-
ister. The pending flags of the message buffer are located in
the CIPND register (read only) and can be cleared by reset-
ting the flags in the CICLR registers.
TX_ONCE_RTR
1110
CAN
schedules TX
RTR
received
TX done
Transmit
request cancelled
CPU writes 1000
Remote transmission
request sent - now wait
to receive a data frame
TX request delayed
by a TX request of higher
priority message
Transmit
request cancelled
CPU writes 1000
CAN
schedules TX
TX request
CPU writes 1100
TX request
CPU writes 1110
CPU writes 1010
TX_BUSY2
1111
TX done
transmit failed
TX_RTR
1010
TX_NOT_ACTIVE
1000
TX_BUSY0
1101
RX_READY
0010
TX_ONCE
1100
transmit failed
DS042