Cp3bt26 – National CP3BT26 User Manual
Page 114
www.national.com
114
CP3BT26
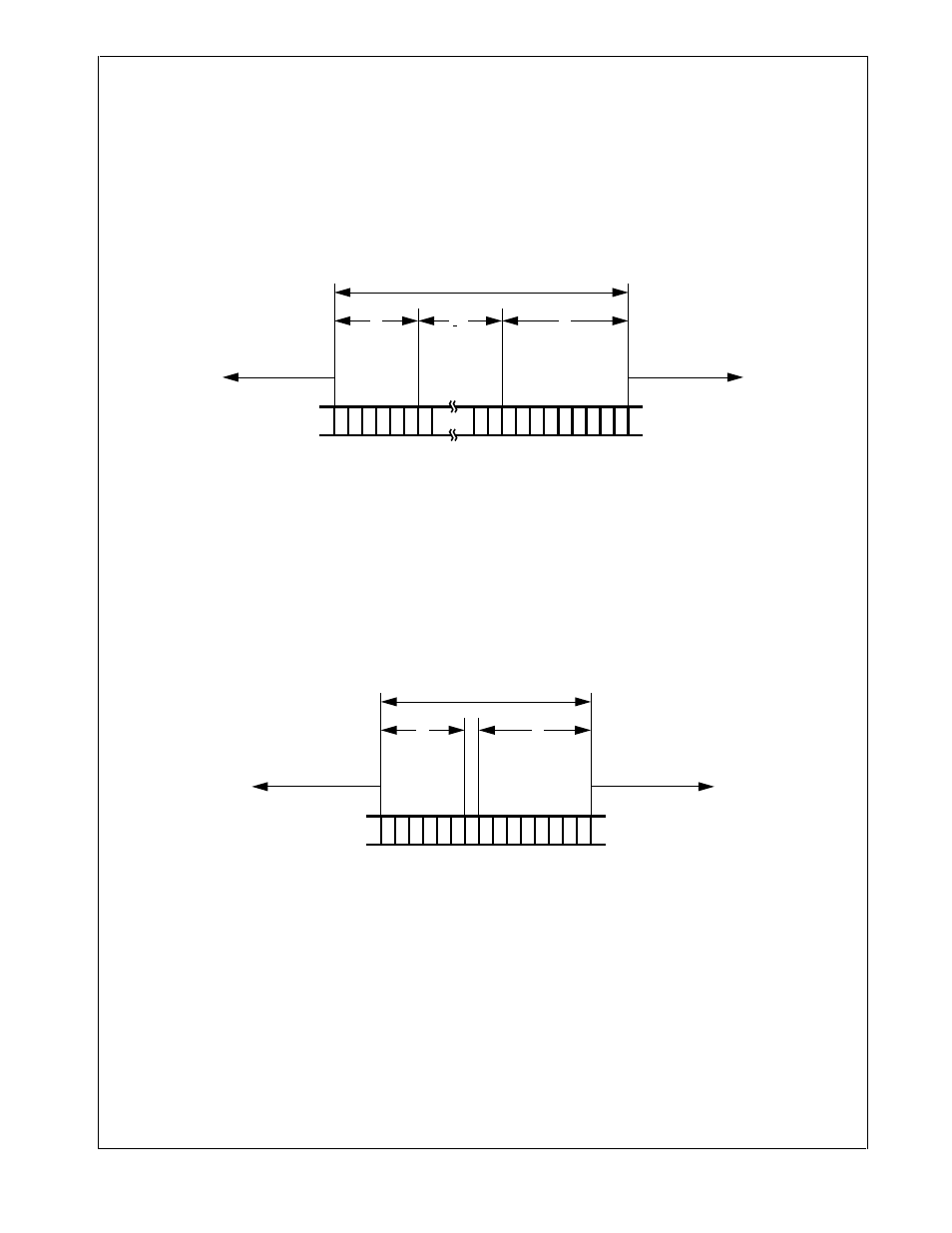
Error Frame
As shown in Figure 40, the Error Frame consists of the error
flag and the error delimiter bit fields. The error flag field is
built up from the various error flags of the different nodes.
Therefore, its length may vary from a minimum of six bits up
to a maximum of twelve bits depending on when a module
has detected the error. Whenever a bit error, stuff error, form
error, or acknowledgment error is detected by a node, the
node starts transmission of an error flag at the next bit. If a
CRC error is detected, transmission of the error flag starts
at the bit following the acknowledge delimiter, unless an er-
ror flag for a previous error condition has already been start-
ed.
If a device is in the error active state, it can send a “domi-
nant” error flag, while a error passive device is only allowed
to transmit “recessive” error flags. This is done to prevent
the CAN bus from getting stuck due to a local defect. For the
various CAN device states, please refer to Error Types on
page 115.
Figure 40.
Error Frame
Overload Frame
As shown in Figure 41, an overload frame consists of the
overload flag and the overload delimiter bit fields. The bit
fields have the same length as the error frame field: six bits
for the overload flag and eight bits for the delimiter. The
overload frame can only be sent after the end of frame
(EOF) field and in this way destroys the fixed form of the in-
termission field. As a result, all other nodes also detect an
overload condition and start the transmission of an overload
flag. After an overload flag has been transmitted, the over-
load frame is closed by the overload delimiter.
Note: The CAN module never initiates an overload frame
due to its inability to process an incoming message. Howev-
er, it is able to recognize and respond to overload frames ini-
tiated by other devices.
Figure 41.
Overload Frame
Interframe Space
Data and remote frames are separated from every preced-
ing frame (data, remote, error and overload frames) by the
interframe space (see Figure 42). Error and overload
frames are not preceded by an interframe space; they can
be transmitted as soon as the condition occurs. The inter-
frame space consists of a minimum of three bit fields de-
pending on the error state of the node.
ERROR FRAME
6
ERROR
FLAG
< 6
ECHO
ERROR FLAG
8
ERROR
DELIMITER
DATA FRAME OR
REMOVE FRAME
An error frame can start anywhere within a frame
INTER-FRAME OR
OVERLOAD FRAME
Note:
d = dominant
r = recessive
r
d
d
d
d
d
d
d
d
d
r
r
r
d
r
r
r
r
DS024
OVERLOAD FRAME
6
OVERLOAD
FLAG
8
OVERLOAD
DELIMITER
END OF FRAME OR
ERROR DELIMITER OR
OVERLOAD DELIMITER
An overload frame can only start at the end of a frame
INTER-FRAME SPACE
OR ERROR FRAME
Note:
d = dominant
r = recessive
r
d
d
d
d
d
d
d
r
r
r
r
r
r
r
DS025