6 programming motion, Overview – Yaskawa SMC–4000 User Manual
Page 274
264
SMC–4000 User Manual
6 Programming Motion
Overview
The SMC–4000 provides several modes of motion, including independent positioning and jogging,
coordinated motion, electronic cam motion, and electronic gearing. Each one of these modes is discussed
in the following sections.
The SMC–4000 is a single axis controller and uses X-axis motion only. The example applications
described below will help guide you to the appropriate mode of motion.
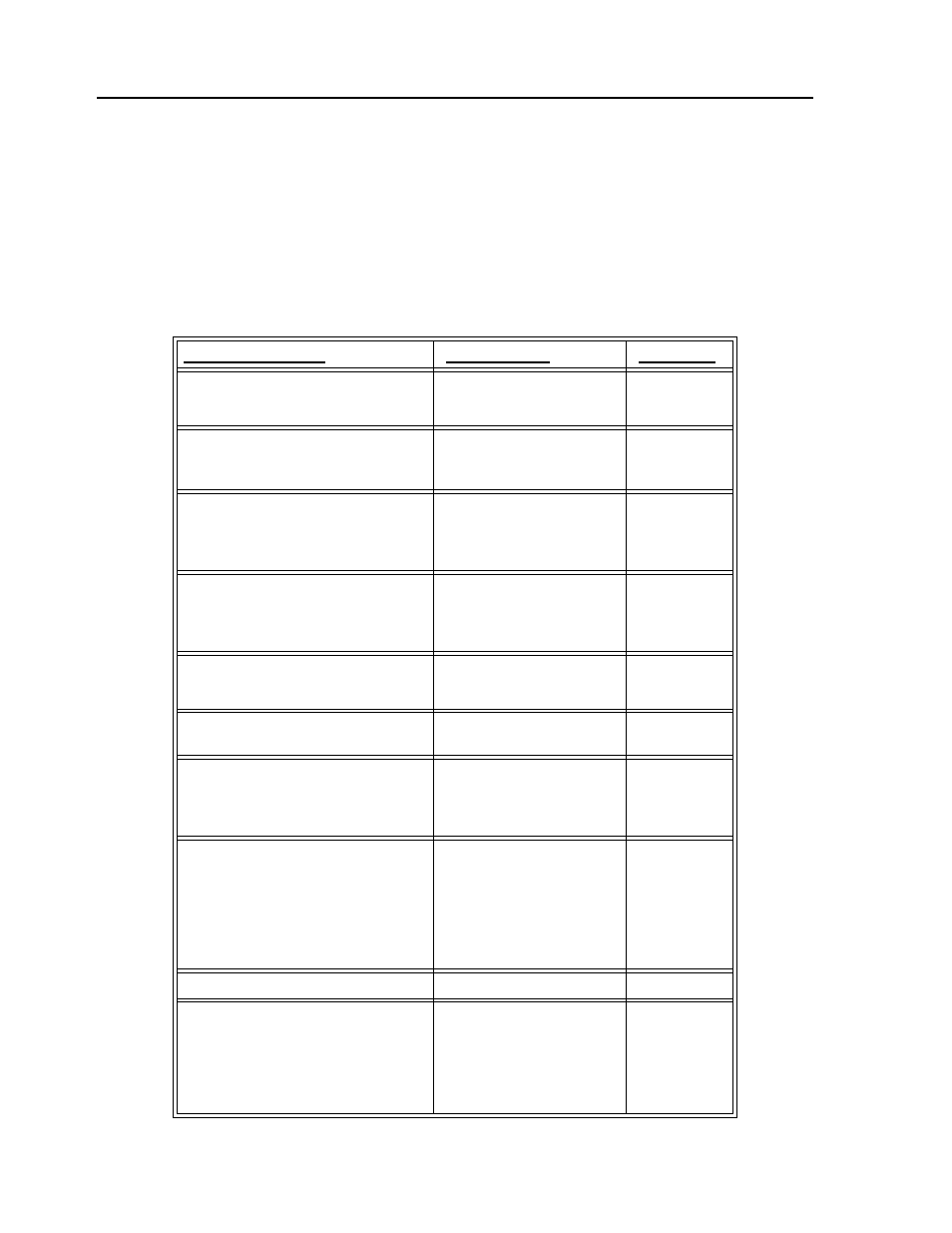
Example Application
Mode of Motion
Commands
Absolute or relative positioning where
each axis is independent and follows
prescribed velocity profile.
Independent Axis Positioning
PA,PR
SP,AC,DC
Velocity control where no final endpoint is
prescribed. Motion stops on Stop
command.
Independent Jogging
JG
AC,DC
ST
Motion Path described as incremental
position points versus time.
Contour Mode
CM
CD
DT
WC
2, 3, or 4-axis coordinated motion where
path is described by linear segments.
Linear Interpolation
LM
LI,LE
VS,VR
VA,VD
Electronic gearing where slave axis is
scaled to master axis which can move in
both directions.
Electronic Gearing
GA
GR
Master/slave where slave axes must follow
a master such as conveyer speed.
Electronic Gearing
GA
GR
Moving along arbitrary profiles or
mathematically prescribed profiles such as
sine or cosine trajectories.
Contour Mode
CM
CD
DT
WC
Teaching or Record and Play Back
Contour Mode with Automatic
Array Capture
CM
CD
DT
WC
RA
RD
RC
Backlash Correction
Dual Loop
DV
2-D motion path consisting of arc
segments and linear segments, such as
engraving or quilting.
Coordinated Motion
VM, CA
VP
CR
VS,VR
VA,VD
VE