Sample message, Ac motor. movimot, Speed [%] setpoint = 50% (from f – Metalfab SEW Eurodrive MOVIMOT MM..C User Manual
Page 126: Po3: 0bb8, Ramp = 3 s request message from movimot
126
Operating Instructions – MOVIMOT® MM03C - MM3XC
9
Function with RS-485 master
Startup with Communications Interface / Fieldbus
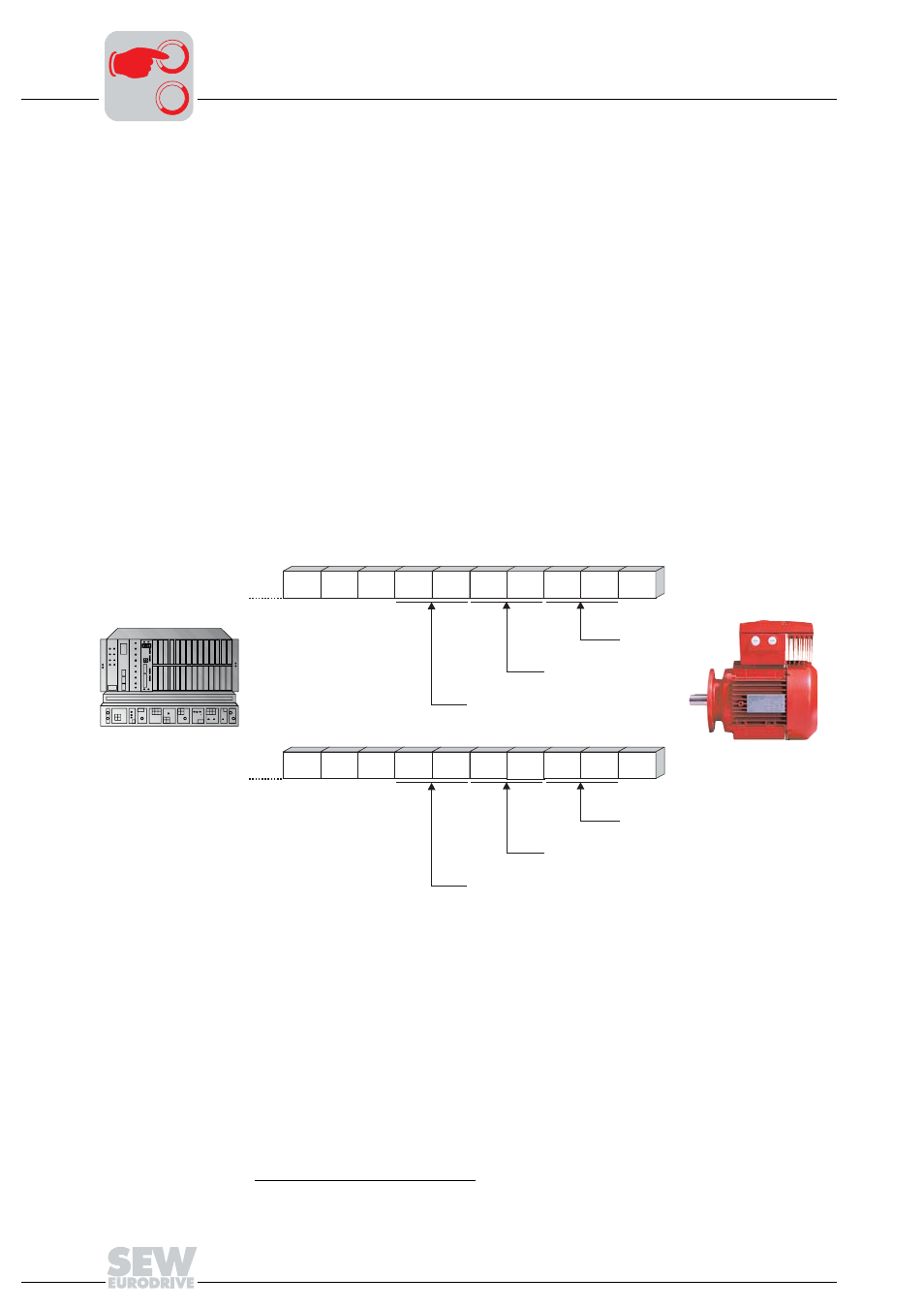
Sample message
This example deals with the control of a MOVIMOT
®
AC motor using the process data
words of PDU type 85
hex
(3 PD acyclical). The RS-485 master sends three process out-
put data (PO) to the MOVIMOT
®
AC motor. MOVIMOT
®
responds with three process
input data words (PI).
Request message
from RS-485 mas-
ter to MOVIMOT
®
PO1: 0006
hex
Control word 1 = Enable
PO2: 2000
hex
Speed [%] setpoint = 50% (from f
max
)
1)
)
PO3: 0BB8
hex
ramp = 3 s
Request message
from MOVIMOT
®
RS-485 master
PI1: 0406
hex
Status word 1
PI2: 0300
hex
Output current [% IN]
PI3: 0607
hex
Status word 2
Coding of process data see section 5.5.
"3PD acyclical" sample message
This example shows acyclical transmission, i.e. no timeout monitoring is active in
MOVIMOT
®
. Cyclical transmission can be implemented with the entry TYPE = 05
hex
. In
this case, MOVIMOT
®
expects the next bus activity (request message of the aforemen-
tioned types) within one second at most, otherwise MOVIMOT
®
automatically brings it-
self to a stop (timeout monitoring).
1) f
max
is preset using f1 setpoint potentiometer
05079AEN
TYP
TYP
ADR
ADR
SD1
SD1
BCC
BCC
MOVIMOT
®
Idle
Idle
02
hex
01
hex
85
hex
00
hex
06
hex
20
hex
00
hex
0B
hex
B8
hex
13
hex
1D
hex
01
hex
85
hex
04
hex
07
hex
03
hex
00
hex
06
hex
07
hex
98
hex
TYP
TYP
ADR
ADR
SD1
SD1
BCC
BCC
MOVIMOT
®
Idle
Idle
02
hex
01
hex
85
hex
00
hex
06
hex
20
hex
00
hex
0B
hex
B8
hex
13
hex
1D
hex
01
hex
85
hex
04
hex
07
hex
03
hex
00
hex
06
hex
07
hex
98
hex
RS-485 Master
PO1: Control word
0006
= Enable
hex
PI1: Status word 1
PO2: Speed[%]
2000
= 50% f
hex
max
PI2: Output current
PO3: Ramp
0BB8
= 3s
hex
PI3: Status word 2
Process Output Data (PO)
Process Input Data (PI)
0
0
I